Discovering Lyapunov functions with transformers
Alberto Alfarano ⋅ Francois Charton ⋅ Amaury Hayat
{kind=link}
Abstract
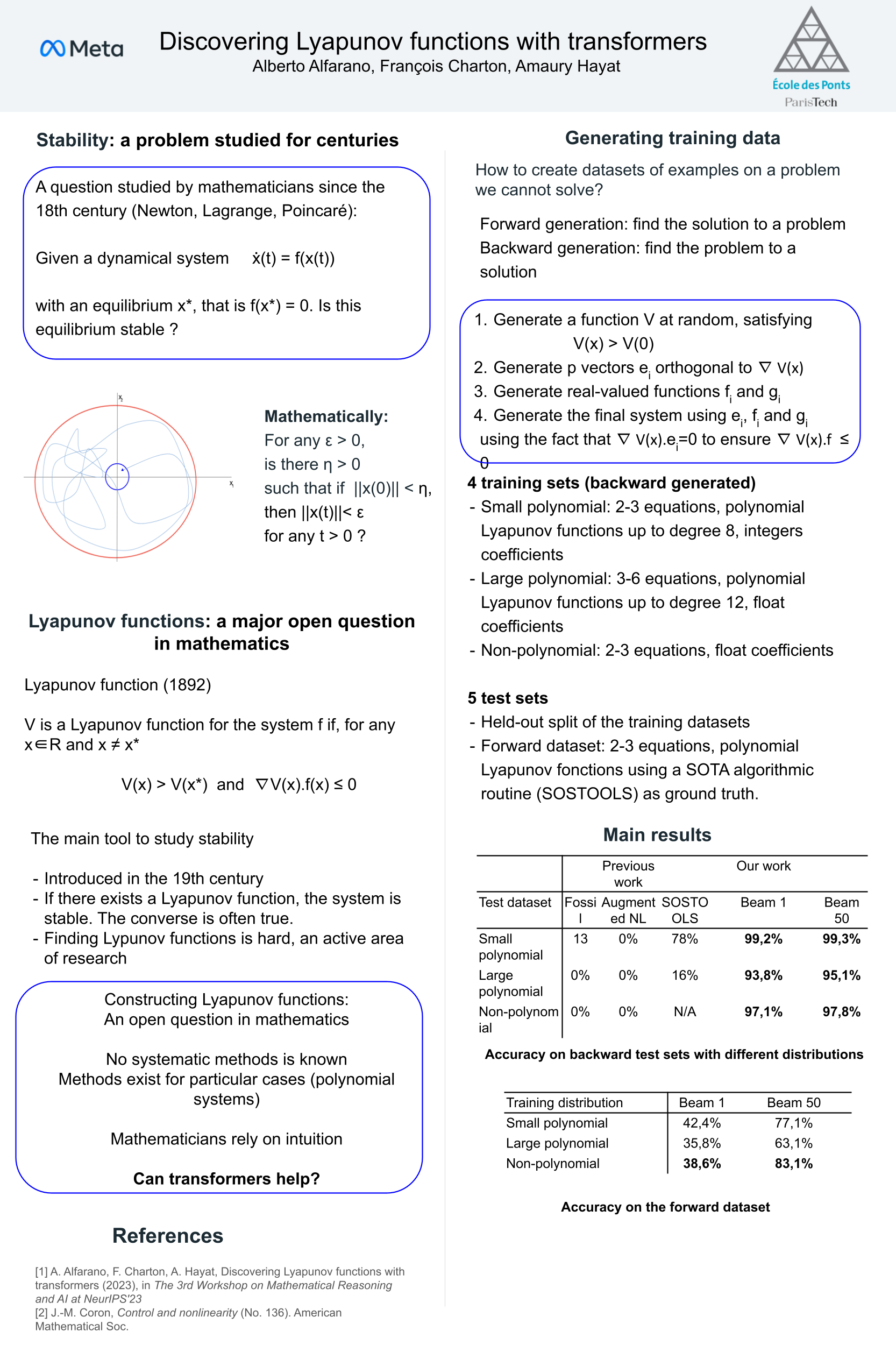
We consider a long-standing open problem in mathematics: discovering the Lyapunov functions that control the global stability of dynamical systems. We propose a method for generating training data, and train sequence-to-sequence transformers to predict the Lyapunov functions of polynomial and non-polynomial systems with high accuracy. We also introduce a new baseline for this problem, and show that our models achieve state-of-the-art results, and outperform approximation based techniques and sum-of-square algorithmic routines.
Chat is not available.
Successful Page Load