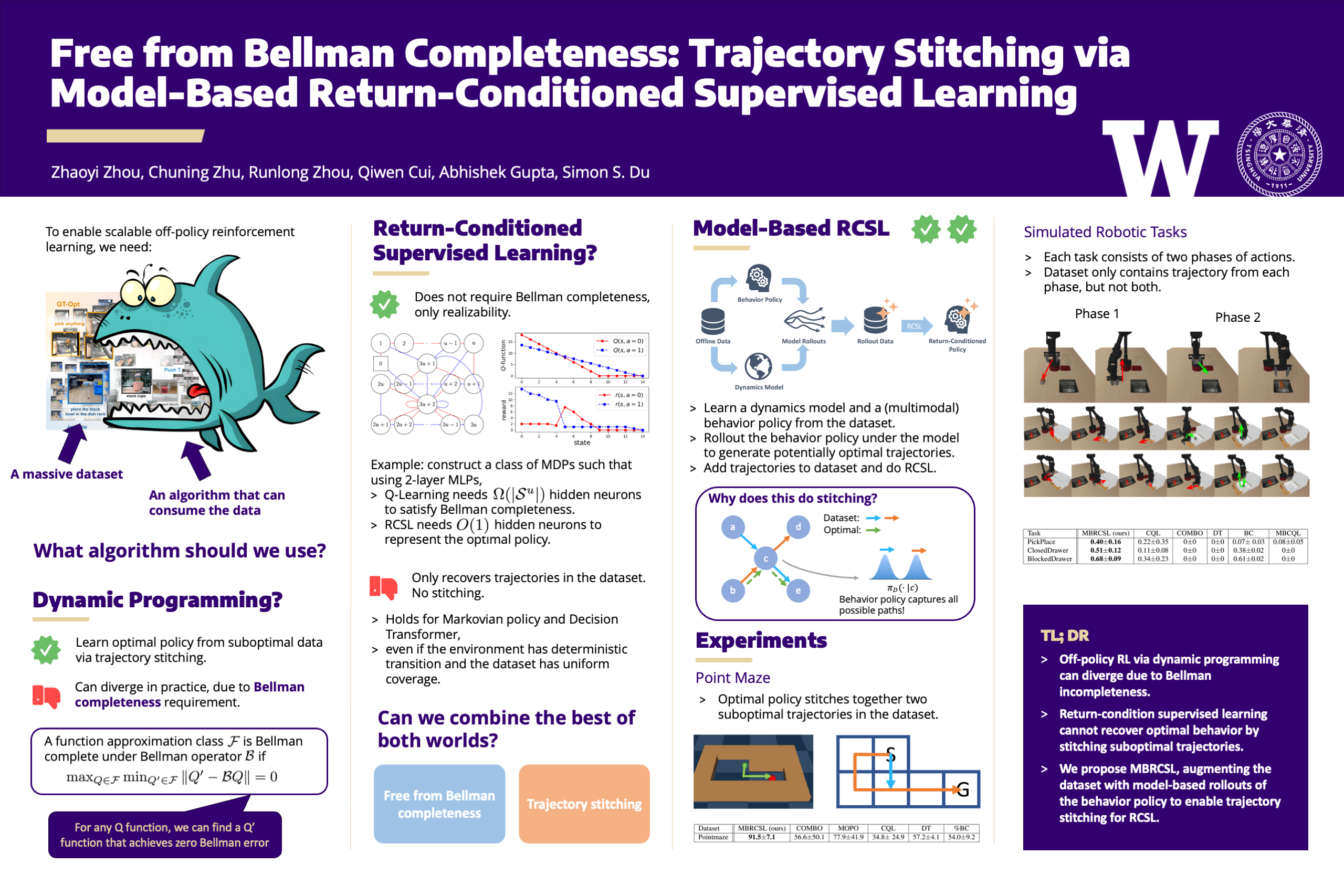
Free from Bellman Completeness: Trajectory Stitching via Model-based Return-conditioned Supervised Learning
Zhaoyi Zhou ⋅ Chuning Zhu ⋅ Runlong Zhou ⋅ Qiwen Cui ⋅ Abhishek Gupta ⋅ Simon Du
{kind=link}
Abstract
Off-policy dynamic programming (DP) techniques that implement fixed-point iteration, such as $Q$-learning, have proven to be an important technique for solving sequential decision-making problems. However, in the presence of function approximation such algorithms are not guaranteed to converge, often diverging due to the absence of Bellman-completeness in the function classes considered, a crucial condition for the success of DP-based methods. In this paper, we show how off-policy learning techniques based on return-conditioned supervised learning (RCSL) are able to circumvent these challenges of Bellman completeness, converging under significantly more relaxed assumptions inherited from supervised learning. We prove there exists a natural environment in which if one uses two-layer multilayer perceptron as the function approximator, the layer width needs to grow *linearly* with the state space size to satisfy Bellman-completeness while a constant layer width is enough for RCSL. These findings take a step towards explaining the superior empirical performance of RCSL methods compared to DP-based methods in many near-deterministic environments in deep reinforcement learning. Furthermore, in order to learn from sub-optimal datasets, we propose a simple framework called MBRCSL, granting RCSL methods the ability of dynamic programming to stitch together segments from distinct trajectories. MBRCSL leverages learned dynamics models and forward sampling to accomplish trajectory stitching while avoiding the need for Bellman completeness that plagues all dynamic programming algorithms. We propose both theoretical analysis and experimental evaluation to back these claims, outperforming state-of-the-art model-free and model-based offline RL algorithms across several simulated robotics problems.
Chat is not available.
Successful Page Load