Temporal Continual Learning with Prior Compensation for Human Motion Prediction
{kind=link}
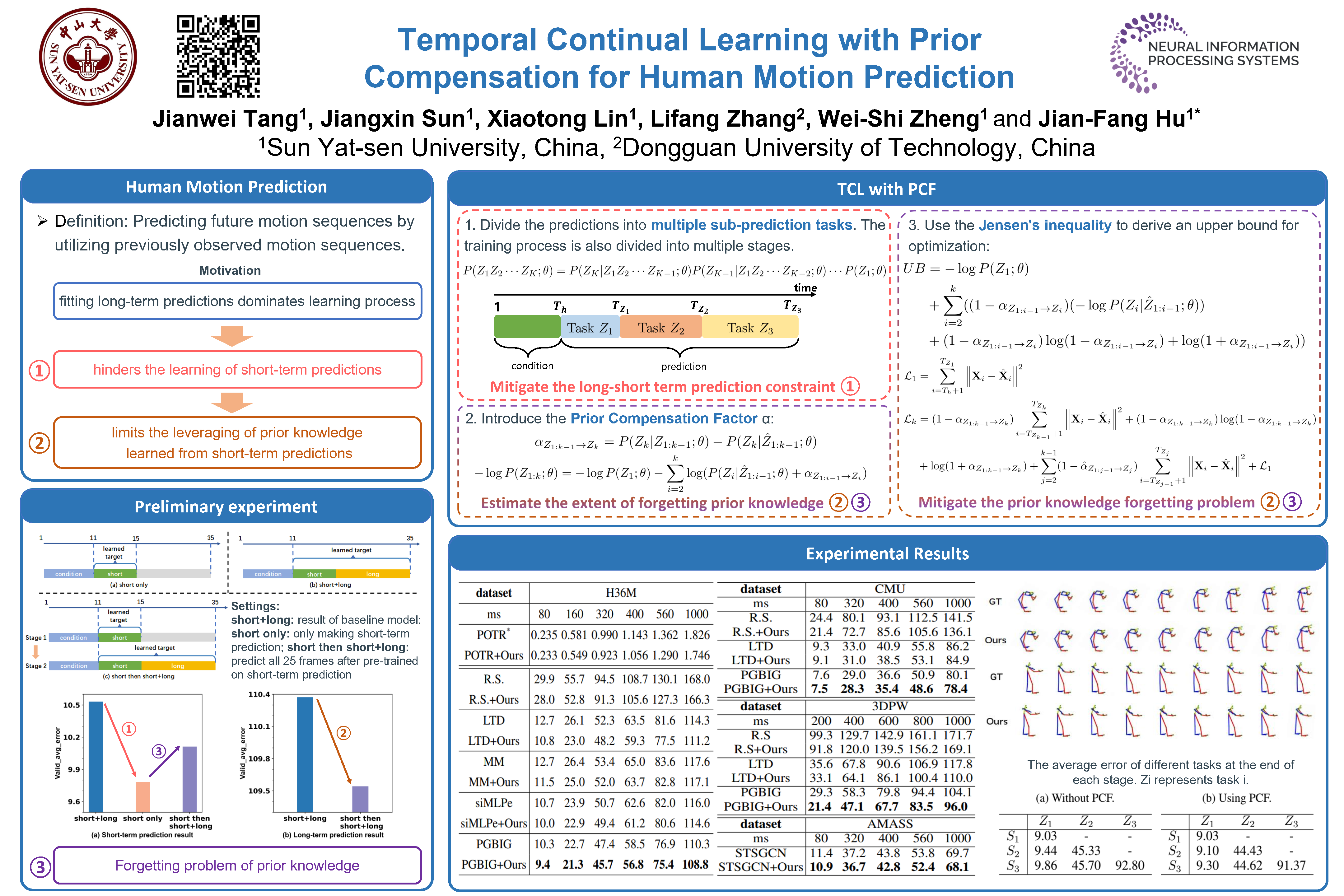
Abstract
Human Motion Prediction (HMP) aims to predict future poses at different moments according to past motion sequences. Previous approaches have treated the prediction of various moments equally, resulting in two main limitations: the learning of short-term predictions is hindered by the focus on long-term predictions, and the incorporation of prior information from past predictions into subsequent predictions is limited. In this paper, we introduce a novel multi-stage training framework called Temporal Continual Learning (TCL) to address the above challenges. To better preserve prior information, we introduce the Prior Compensation Factor (PCF). We incorporate it into the model training to compensate for the lost prior information. Furthermore, we derive a more reasonable optimization objective through theoretical derivation. It is important to note that our TCL framework can be easily integrated with different HMP backbone models and adapted to various datasets and applications. Extensive experiments on four HMP benchmark datasets demonstrate the effectiveness and flexibility of TCL. The code is available at https://github.com/hyqlat/TCL.