Annotator: A Generic Active Learning Baseline for LiDAR Semantic Segmentation
{kind=link}
Abstract
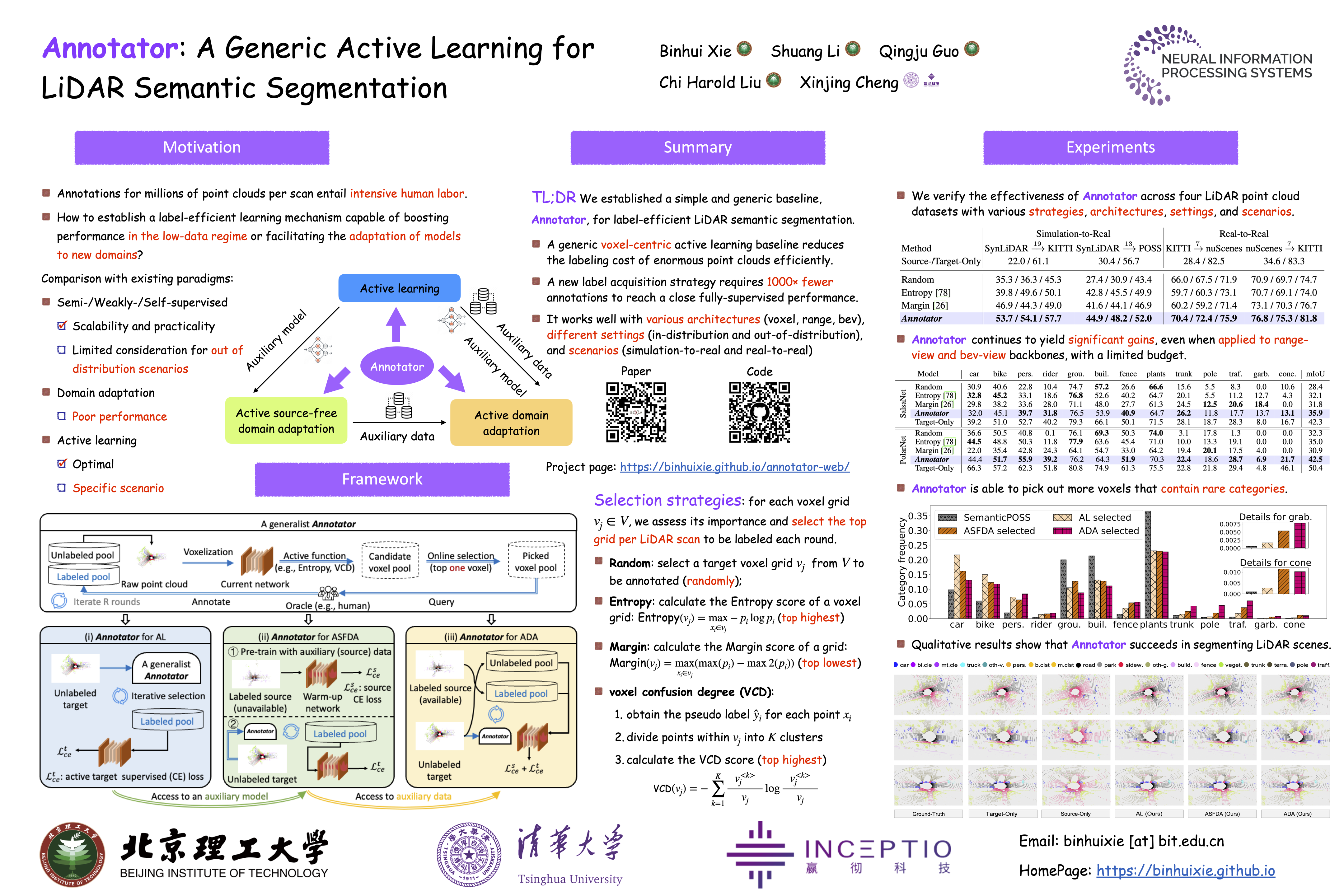
Active learning, a label-efficient paradigm, empowers models to interactively query an oracle for labeling new data. In the realm of LiDAR semantic segmentation, the challenges stem from the sheer volume of point clouds, rendering annotation labor-intensive and cost-prohibitive. This paper presents Annotator, a general and efficient active learning baseline, in which a voxel-centric online selection strategy is tailored to efficiently probe and annotate the salient and exemplar voxel girds within each LiDAR scan, even under distribution shift. Concretely, we first execute an in-depth analysis of several common selection strategies such as Random, Entropy, Margin, and then develop voxel confusion degree (VCD) to exploit the local topology relations and structures of point clouds. Annotator excels in diverse settings, with a particular focus on active learning (AL), active source-free domain adaptation (ASFDA), and active domain adaptation (ADA). It consistently delivers exceptional performance across LiDAR semantic segmentation benchmarks, spanning both simulation-to-real and real-to-real scenarios. Surprisingly, Annotator exhibits remarkable efficiency, requiring significantly fewer annotations, e.g., just labeling five voxels per scan in the SynLiDAR → SemanticKITTI task. This results in impressive performance, achieving 87.8% fully-supervised performance under AL, 88.5% under ASFDA, and 94.4% under ADA. We envision that Annotator will offer a simple, general, and efficient solution for label-efficient 3D applications.