Breadcrumbs to the Goal: Goal-Conditioned Exploration from Human-in-the-Loop Feedback
{kind=link}
Abstract
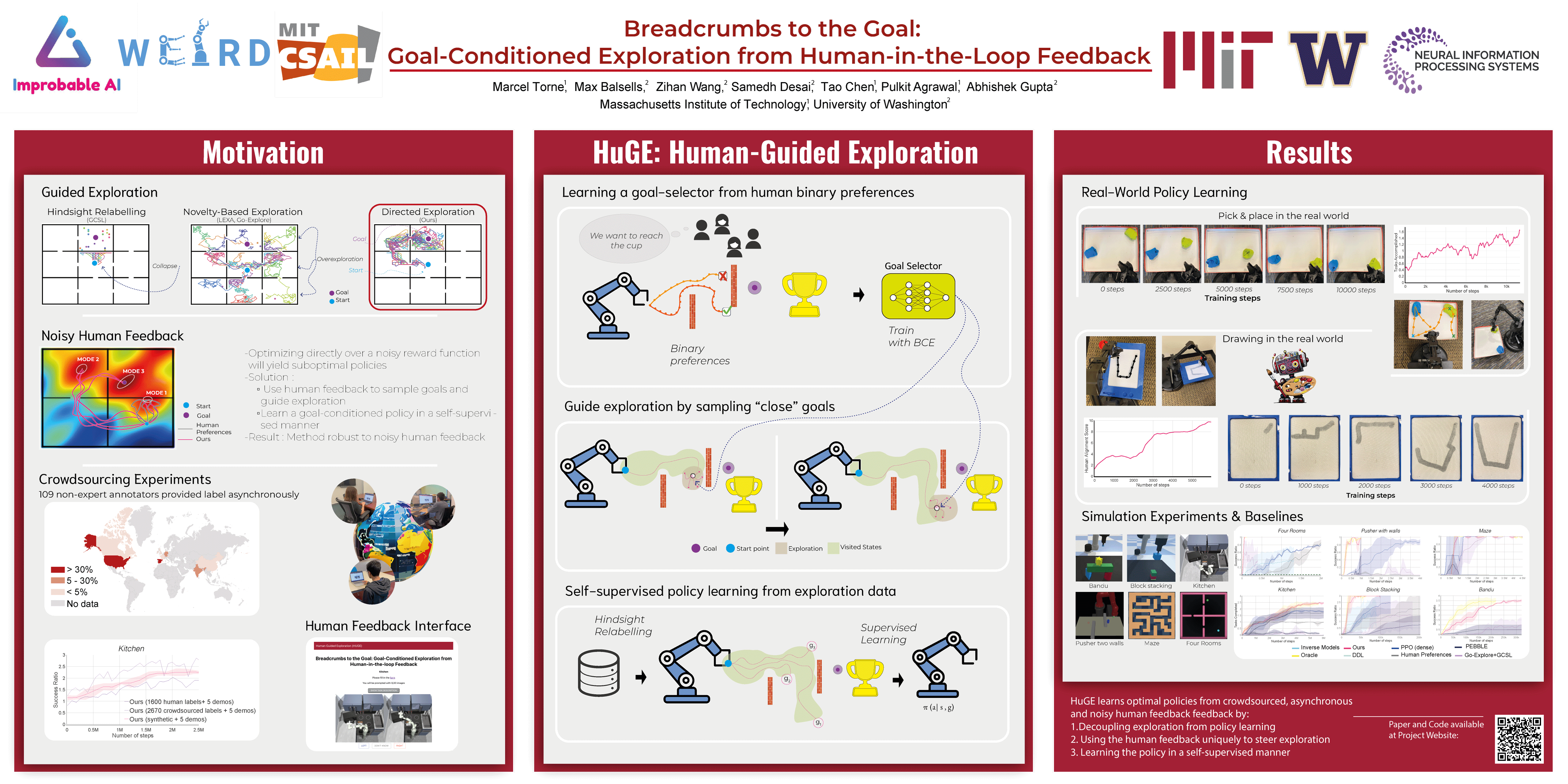
Exploration and reward specification are fundamental and intertwined challenges for reinforcement learning. Solving sequential decision making tasks with a non-trivial element of exploration requires either specifying carefully designed reward functions or relying on indiscriminate, novelty seeking exploration bonuses. Human supervisors can provide effective guidance in the loop to direct the exploration process, but prior methods to leverage this guidance require constant synchronous high-quality human feedback, which is expensive and impractical to obtain. In this work, we propose a technique - Human Guided Exploration (HUGE), that is able to leverage low-quality feedback from non-expert users, which is infrequent, asynchronous and noisy, to guide exploration for reinforcement learning, without requiring careful reward specification. The key idea is to separate the challenges of directed exploration and policy learning - human feedback is used to direct exploration, while self-supervised policy learning is used to independently learn unbiased behaviors from the collected data. We show that this procedure can leverage noisy, asynchronous human feedback to learn tasks with no hand-crafted reward design or exploration bonuses. We show that HUGE is able to learn a variety of challenging multi-stage robotic navigation and manipulation tasks in simulation using crowdsourced feedback from non-expert users. Moreover, this paradigm can be scaled to learning directly on real-world robots.