Uncertainty Estimation for Safety-critical Scene Segmentation via Fine-grained Reward Maximization
{kind=link}
Abstract
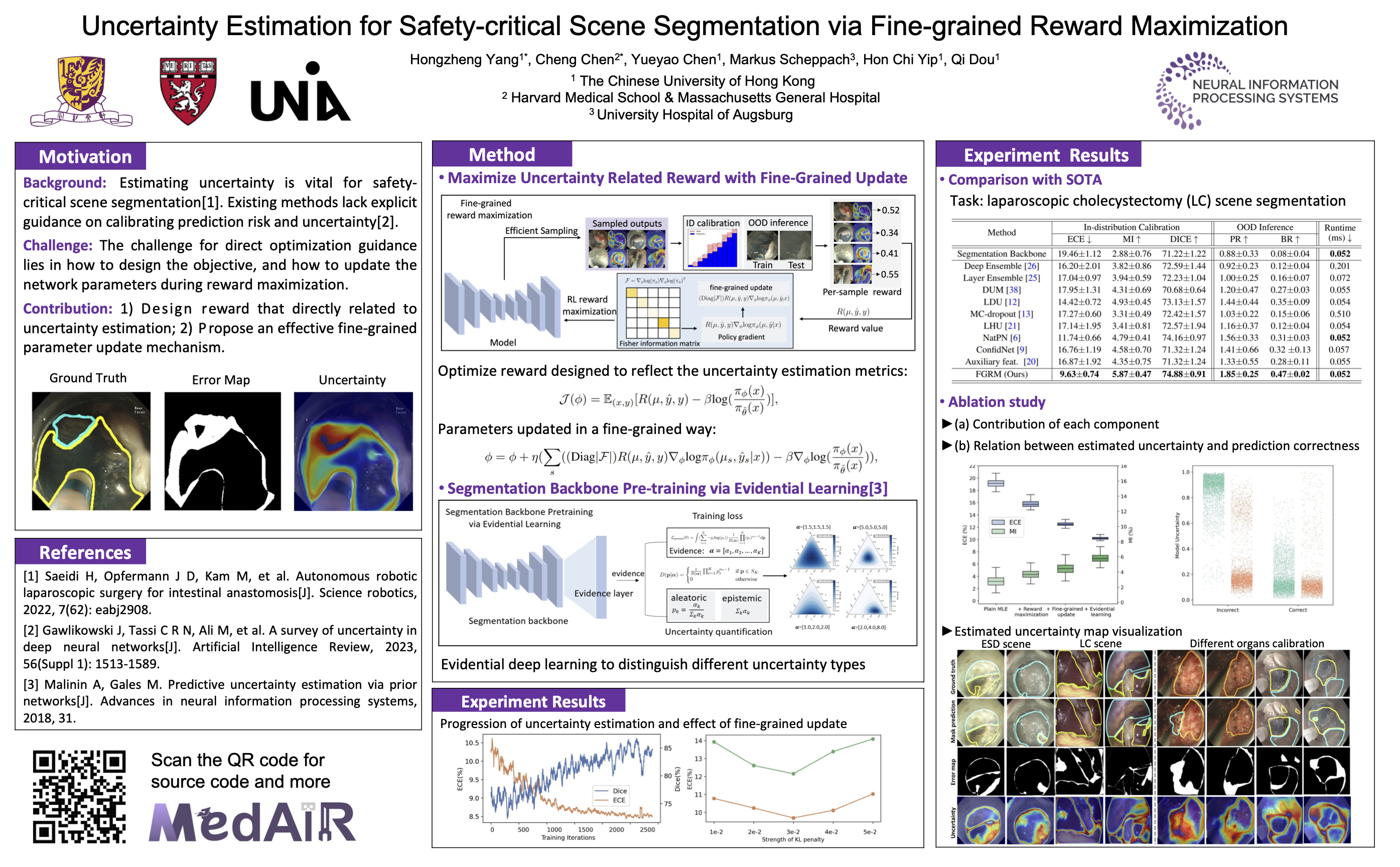
Uncertainty estimation plays an important role for future reliable deployment of deep segmentation models in safety-critical scenarios such as medical applications. However, existing methods for uncertainty estimation have been limited by the lack of explicit guidance for calibrating the prediction risk and model confidence. In this work, we propose a novel fine-grained reward maximization (FGRM) framework, to address uncertainty estimation by directly utilizing an uncertainty metric related reward function with a reinforcement learning based model tuning algorithm. This would benefit the model uncertainty estimation with direct optimization guidance for model calibration. Specifically, our method designs a new uncertainty estimation reward function using the calibration metric, which is maximized to fine-tune an evidential learning pre-trained segmentation model for calibrating prediction risk. Importantly, we innovate an effective fine-grained parameter update scheme, which imposes fine-grained reward-weighting of each network parameter according to the parameter importance quantified by the fisher information matrix. To the best of our knowledge, this is the first work exploring reward optimization for model uncertainty estimation in safety-critical vision tasks. The effectiveness of our method is demonstrated on two large safety-critical surgical scene segmentation datasets under two different uncertainty estimation settings. With real-time one forward pass at inference, our method outperforms state-of-the-art methods by a clear margin on all the calibration metrics of uncertainty estimation, while maintaining a high task accuracy for the segmentation results. Code is available at https://github.com/med-air/FGRM.