Doubly Robust Augmented Transfer for Meta-Reinforcement Learning
{kind=link}
Abstract
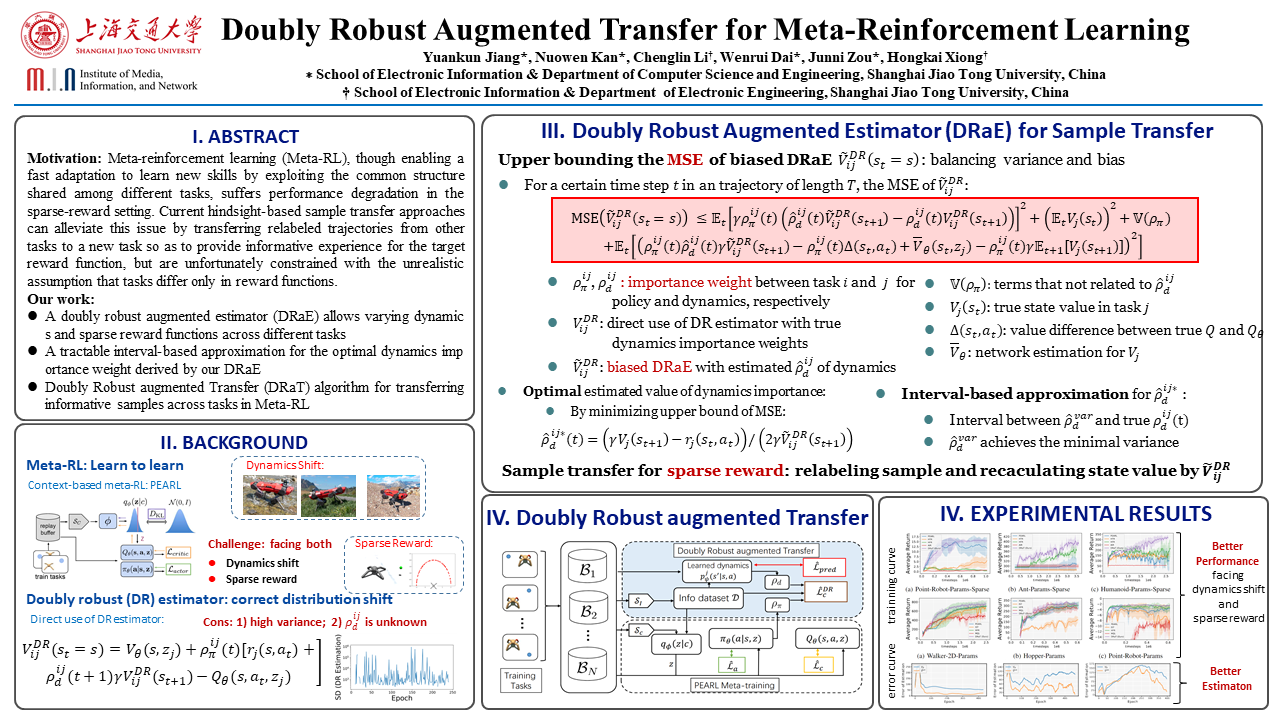
Meta-reinforcement learning (Meta-RL), though enabling a fast adaptation to learn new skills by exploiting the common structure shared among different tasks, suffers performance degradation in the sparse-reward setting. Current hindsight-based sample transfer approaches can alleviate this issue by transferring relabeled trajectories from other tasks to a new task so as to provide informative experience for the target reward function, but are unfortunately constrained with the unrealistic assumption that tasks differ only in reward functions. In this paper, we propose a doubly robust augmented transfer (DRaT) approach, aiming at addressing the more general sparse reward meta-RL scenario with both dynamics mismatches and varying reward functions across tasks. Specifically, we design a doubly robust augmented estimator for efficient value-function evaluation, which tackles dynamics mismatches with the optimal importance weight of transition distributions achieved by minimizing the theoretically derived upper bound of mean squared error (MSE) between the estimated values of transferred samples and their true values in the target task. Due to its intractability, we then propose an interval-based approximation to this optimal importance weight, which is guaranteed to cover the optimum with a constrained and sample-independent upper bound on the MSE approximation error. Based on our theoretical findings, we finally develop a DRaT algorithm for transferring informative samples across tasks during the training of meta-RL. We implement DRaT on an off-policy meta-RL baseline, and empirically show that it significantly outperforms other hindsight-based approaches on various sparse-reward MuJoCo locomotion tasks with varying dynamics and reward functions.