GALOPA: Graph Transport Learning with Optimal Plan Alignment
{kind=link}
Abstract
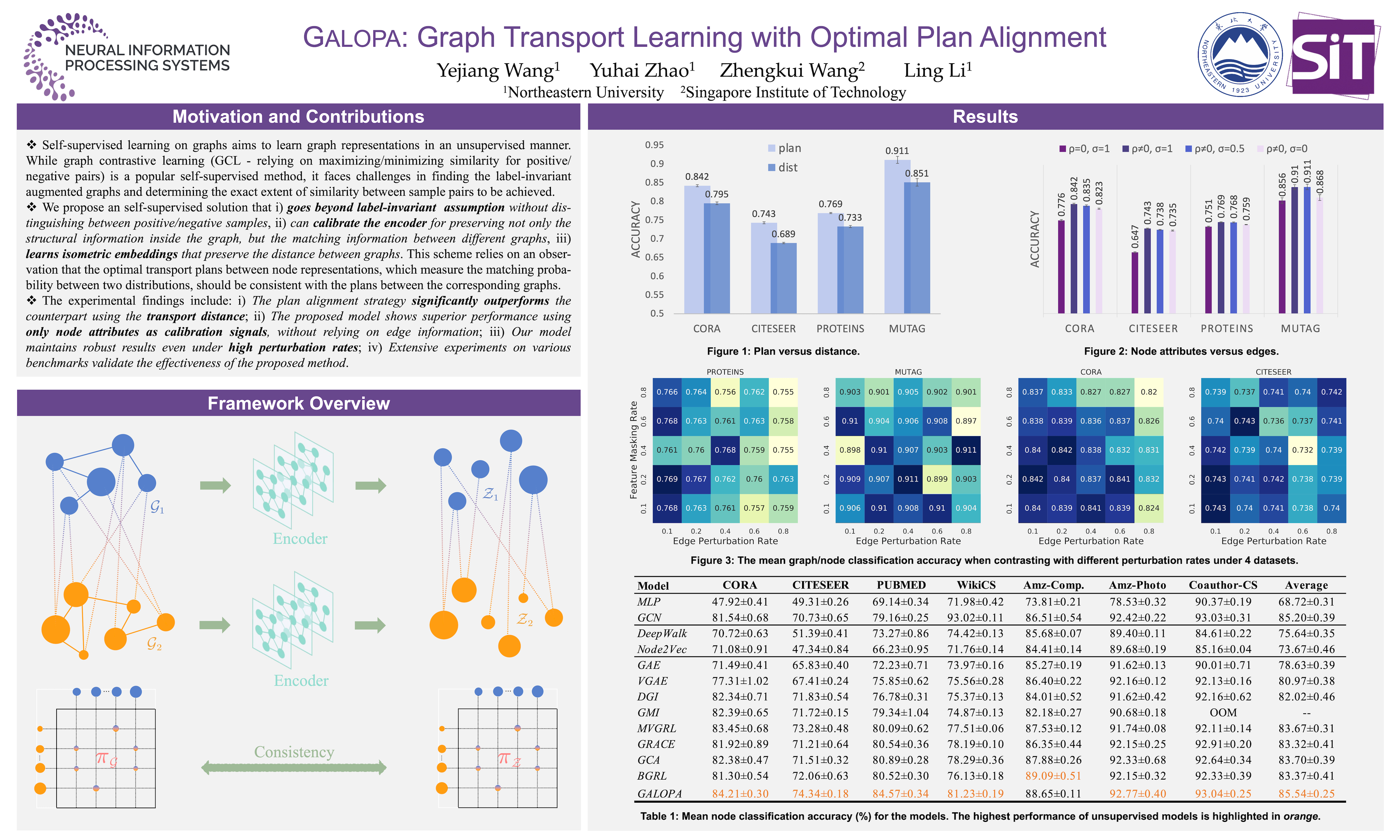
Self-supervised learning on graph aims to learn graph representations in an unsupervised manner. While graph contrastive learning (GCL - relying on graph augmentation for creating perturbation views of anchor graphs and maximizing/minimizing similarity for positive/negative pairs) is a popular self-supervised method, it faces challenges in finding label-invariant augmented graphs and determining the exact extent of similarity between sample pairs to be achieved. In this work, we propose an alternative self-supervised solution that (i) goes beyond the label invariance assumption without distinguishing between positive/negative samples, (ii) can calibrate the encoder for preserving not only the structural information inside the graph, but the matching information between different graphs, (iii) learns isometric embeddings that preserve the distance between graphs, a by-product of our objective. Motivated by optimal transport theory, this scheme relays on an observation that the optimal transport plans between node representations at the output space, which measure the matching probability between two distributions, should be consistent to the plans between the corresponding graphs at the input space. The experimental findings include: (i) The plan alignment strategy significantly outperforms the counterpart using the transport distance; (ii) The proposed model shows superior performance using only node attributes as calibration signals, without relying on edge information; (iii) Our model maintains robust results even under high perturbation rates; (iv) Extensive experiments on various benchmarks validate the effectiveness of the proposed method.