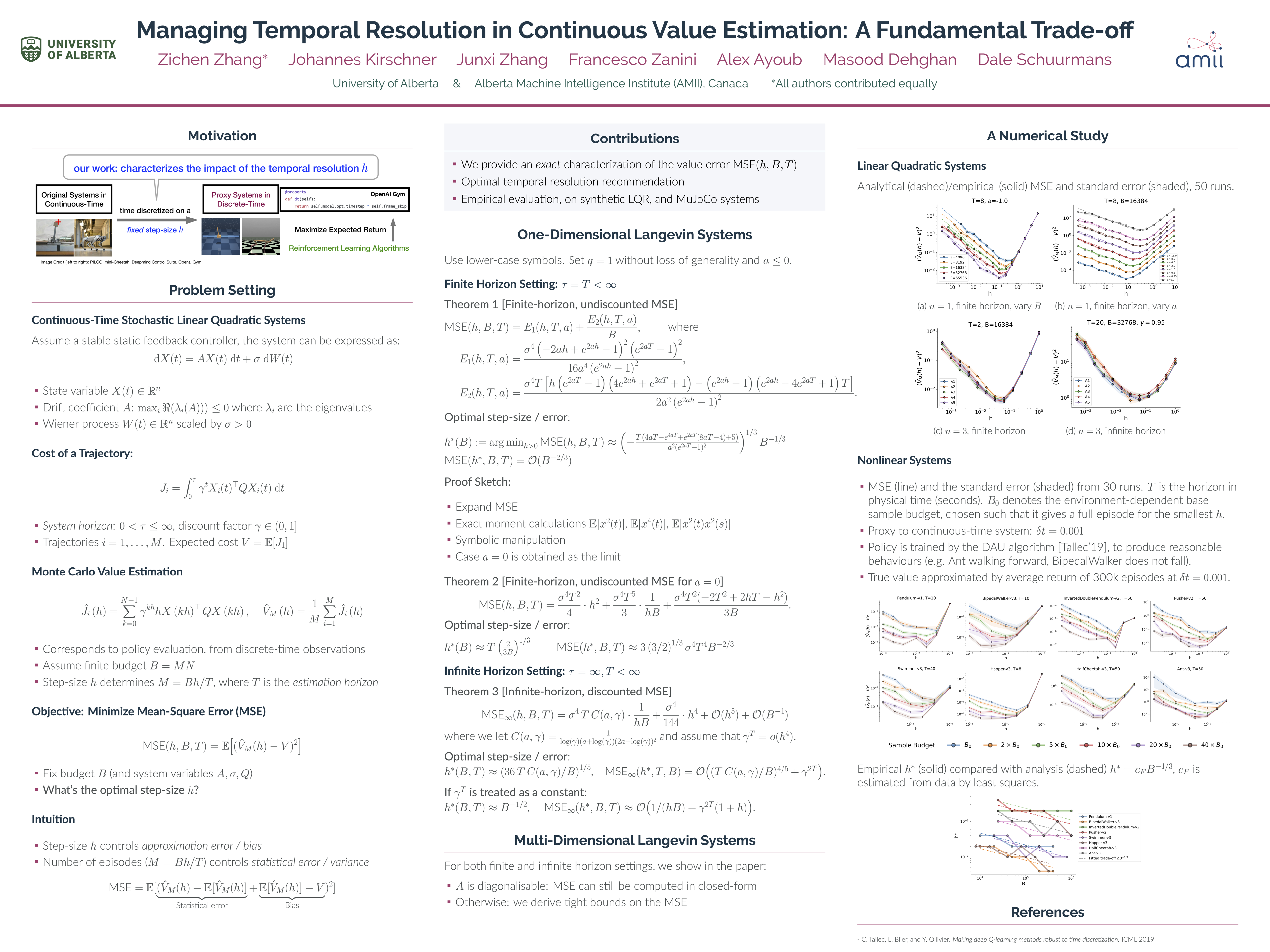
Managing Temporal Resolution in Continuous Value Estimation: A Fundamental Trade-off
{kind=link}
Abstract
A default assumption in reinforcement learning (RL) and optimal control is that observations arrive at discrete time points on a fixed clock cycle. Yet, many applications involve continuous-time systems where the time discretization, in principle, can be managed. The impact of time discretization on RL methods has not been fully characterized in existing theory, but a more detailed analysis of its effect could reveal opportunities for improving data-efficiency. We address this gap by analyzing Monte-Carlo policy evaluation for LQR systems and uncover a fundamental trade-off between approximation and statistical error in value estimation. Importantly, these two errors behave differently to time discretization, leading to an optimal choice of temporal resolution for a given data budget. These findings show that managing the temporal resolution can provably improve policy evaluation efficiency in LQR systems with finite data. Empirically, we demonstrate the trade-off in numerical simulations of LQR instances and standard RL benchmarks for non-linear continuous control.