One Risk to Rule Them All: A Risk-Sensitive Perspective on Model-Based Offline Reinforcement Learning
{kind=link}
Abstract
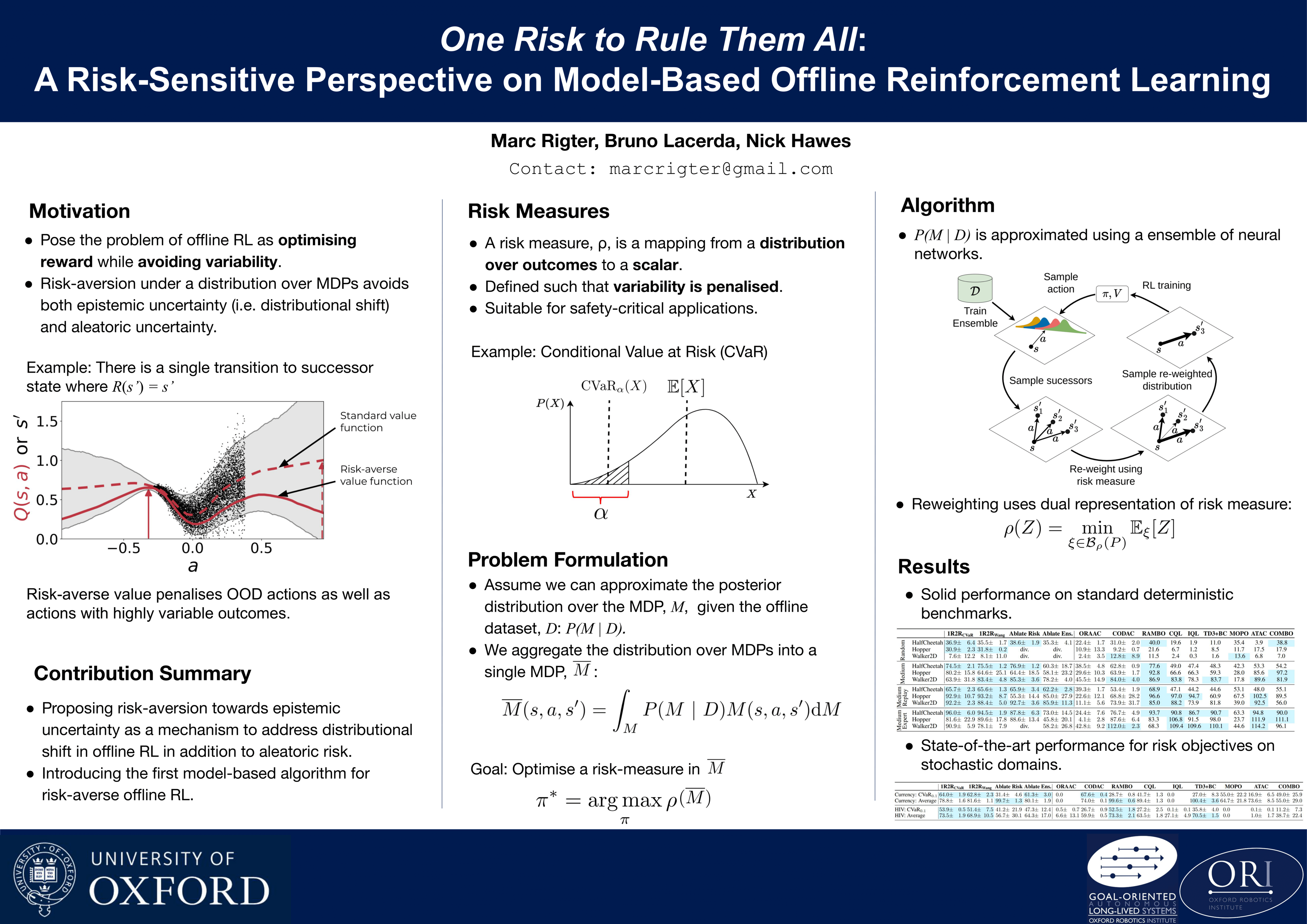
Offline reinforcement learning (RL) is suitable for safety-critical domains where online exploration is not feasible. In such domains, decision-making should take into consideration the risk of catastrophic outcomes. In other words, decision-making should be risk-averse. An additional challenge of offline RL is avoiding distributional shift, i.e. ensuring that state-action pairs visited by the policy remain near those in the dataset. Previous offline RL algorithms that consider risk combine offline RL techniques (to avoid distributional shift), with risk-sensitive RL algorithms (to achieve risk-aversion). In this work, we propose risk-aversion as a mechanism to jointly address both of these issues. We propose a model-based approach, and use an ensemble of models to estimate epistemic uncertainty, in addition to aleatoric uncertainty. We train a policy that is risk-averse, and avoids high uncertainty actions. Risk-aversion to epistemic uncertainty prevents distributional shift, as areas not covered by the dataset have high epistemic uncertainty. Risk-aversion to aleatoric uncertainty discourages actions that are risky due to environment stochasticity. Thus, by considering epistemic uncertainty via a model ensemble and introducing risk-aversion, our algorithm (1R2R) avoids distributional shift in addition to achieving risk-aversion to aleatoric risk. Our experiments show that 1R2R achieves strong performance on deterministic benchmarks, and outperforms existing approaches for risk-sensitive objectives in stochastic domains.