Learning Generalizable Agents via Saliency-guided Features Decorrelation
{kind=link}
Abstract
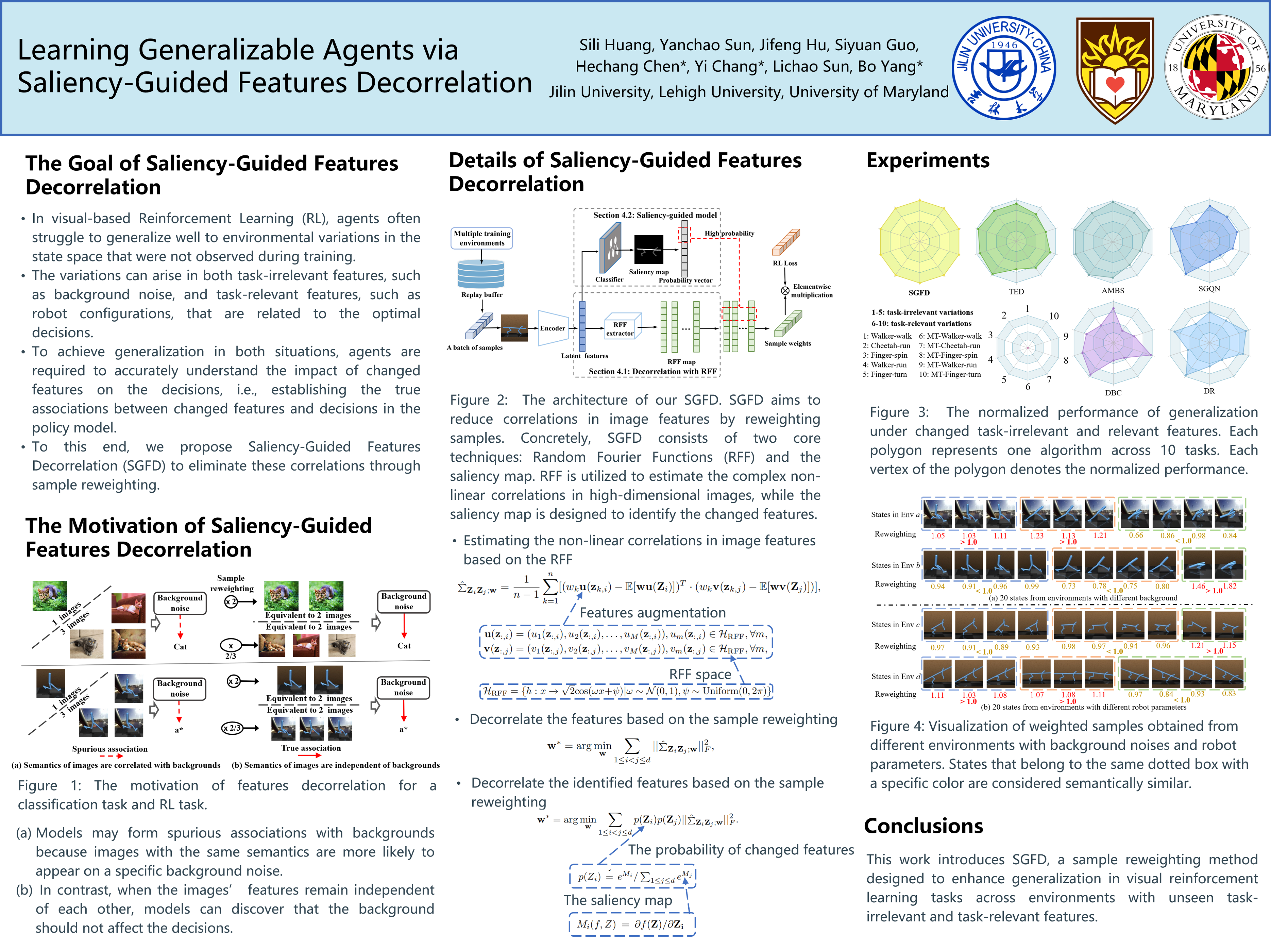
In visual-based Reinforcement Learning (RL), agents often struggle to generalize well to environmental variations in the state space that were not observed during training. The variations can arise in both task-irrelevant features, such as background noise, and task-relevant features, such as robot configurations, that are related to the optimal decisions. To achieve generalization in both situations, agents are required to accurately understand the impact of changed features on the decisions, i.e., establishing the true associations between changed features and decisions in the policy model. However, due to the inherent correlations among features in the state space, the associations between features and decisions become entangled, making it difficult for the policy to distinguish them. To this end, we propose Saliency-Guided Features Decorrelation (SGFD) to eliminate these correlations through sample reweighting. Concretely, SGFD consists of two core techniques: Random Fourier Functions (RFF) and the saliency map. RFF is utilized to estimate the complex non-linear correlations in high-dimensional images, while the saliency map is designed to identify the changed features. Under the guidance of the saliency map, SGFD employs sample reweighting to minimize the estimated correlations related to changed features, thereby achieving decorrelation in visual RL tasks. Our experimental results demonstrate that SGFD can generalize well on a wide range of test environments and significantly outperforms state-of-the-art methods in handling both task-irrelevant variations and task-relevant variations.