Segment Any Point Cloud Sequences by Distilling Vision Foundation Models
{kind=link}
Abstract
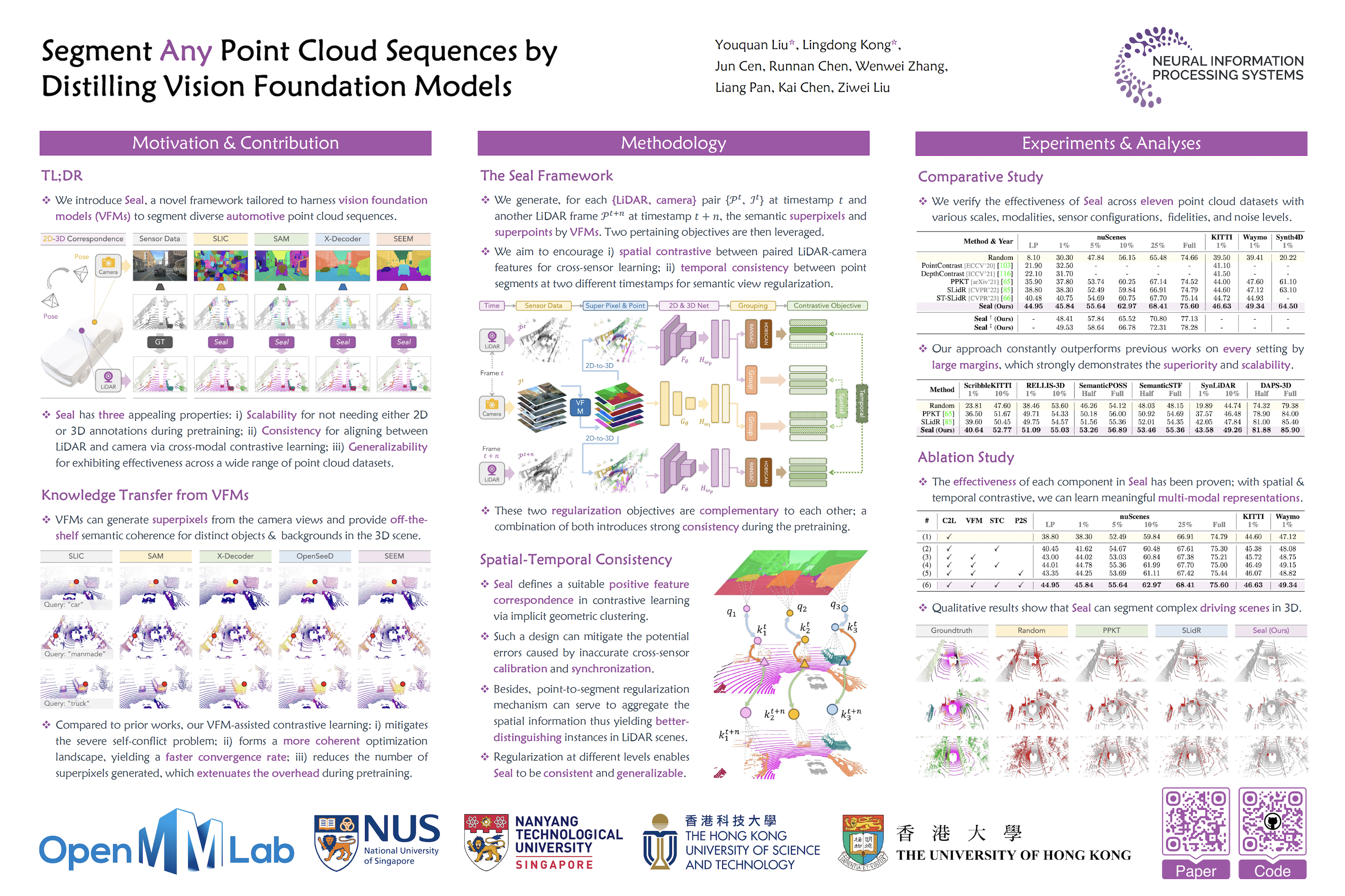
Recent advancements in vision foundation models (VFMs) have opened up new possibilities for versatile and efficient visual perception. In this work, we introduce Seal, a novel framework that harnesses VFMs for segmenting diverse automotive point cloud sequences. Seal exhibits three appealing properties: i) Scalability: VFMs are directly distilled into point clouds, obviating the need for annotations in either 2D or 3D during pretraining. ii) Consistency: Spatial and temporal relationships are enforced at both the camera-to-LiDAR and point-to-segment regularization stages, facilitating cross-modal representation learning. iii) Generalizability: Seal enables knowledge transfer in an off-the-shelf manner to downstream tasks involving diverse point clouds, including those from real/synthetic, low/high-resolution, large/small-scale, and clean/corrupted datasets. Extensive experiments conducted on eleven different point cloud datasets showcase the effectiveness and superiority of Seal. Notably, Seal achieves a remarkable 45.0% mIoU on nuScenes after linear probing, surpassing random initialization by 36.9% mIoU and outperforming prior arts by 6.1% mIoU. Moreover, Seal demonstrates significant performance gains over existing methods across 20 different few-shot fine-tuning tasks on all eleven tested point cloud datasets. The code is available at this link.