Triangulation Residual Loss for Data-efficient 3D Pose Estimation
{kind=link}
Abstract
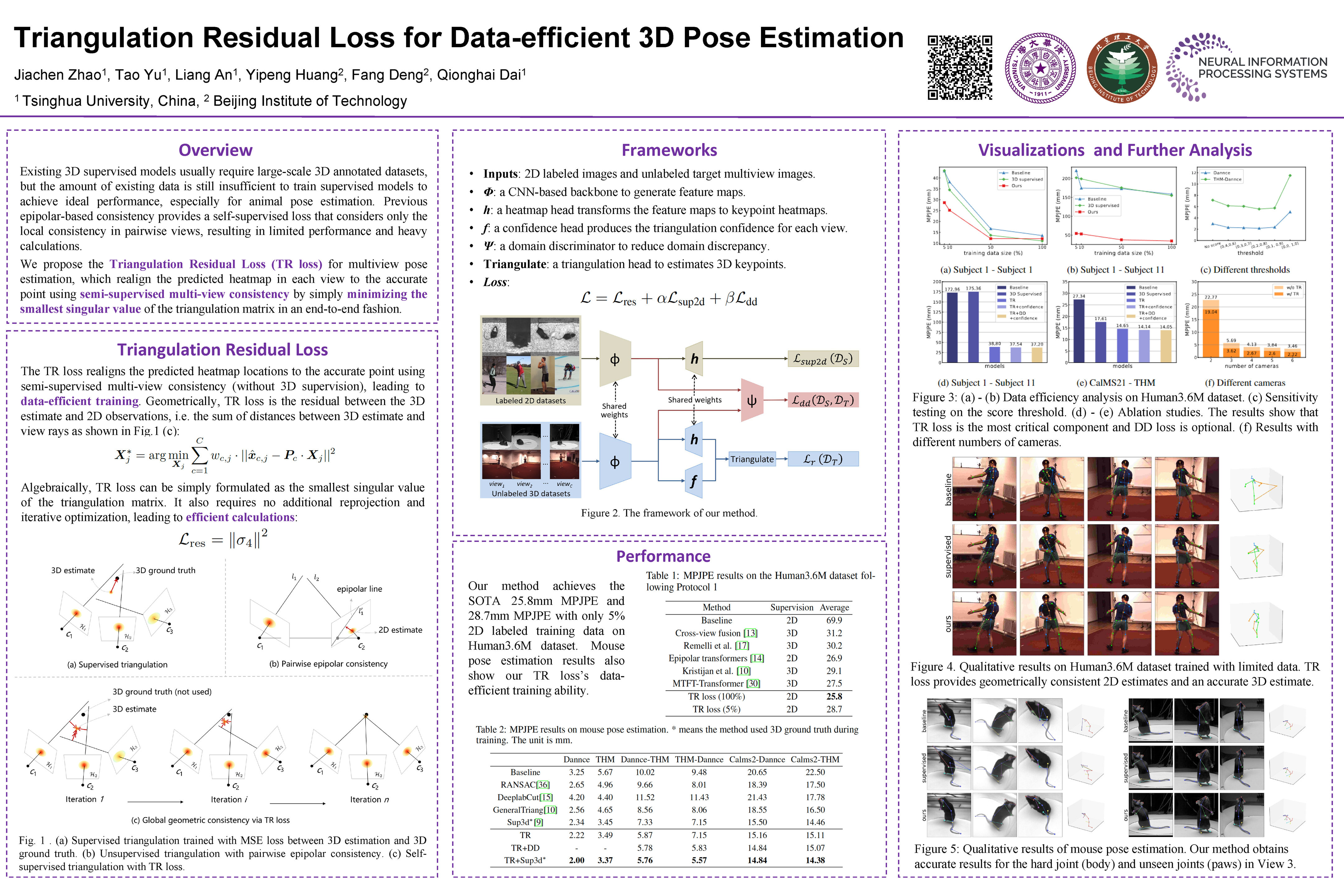
This paper presents Triangulation Residual loss (TR loss) for multiview 3D pose estimation in a data-efficient manner. Existing 3D supervised models usually require large-scale 3D annotated datasets, but the amount of existing data is still insufficient to train supervised models to achieve ideal performance, especially for animal pose estimation. To employ unlabeled multiview data for training, previous epipolar-based consistency provides a self-supervised loss that considers only the local consistency in pairwise views, resulting in limited performance and heavy calculations. In contrast, TR loss enables self-supervision with global multiview geometric consistency. Starting from initial 2D keypoint estimates, the TR loss can fine-tune the corresponding 2D detector without 3D supervision by simply minimizing the smallest singular value of the triangulation matrix in an end-to-end fashion. Our method achieves the state-of-the-art 25.8mm MPJPE and competitive 28.7mm MPJPE with only 5\% 2D labeled training data on the Human3.6M dataset. Experiments on animals such as mice demonstrate our TR loss's data-efficient training ability.