Combating Bilateral Edge Noise for Robust Link Prediction
{kind=link}
Abstract
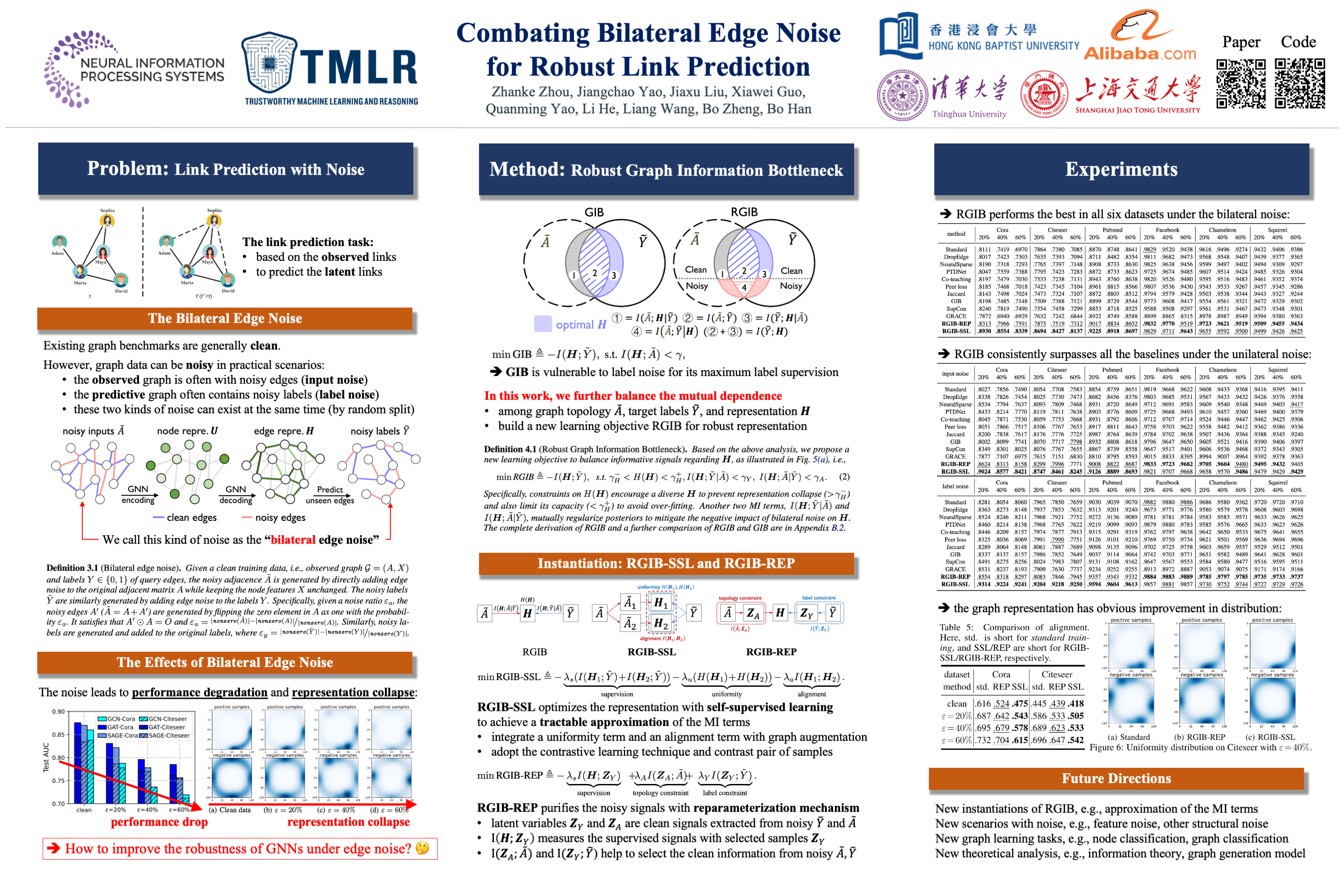
Although link prediction on graphs has achieved great success with the development of graph neural networks (GNNs), the potential robustness under the edge noise is still less investigated. To close this gap, we first conduct an empirical study to disclose that the edge noise bilaterally perturbs both input topology and target label, yielding severe performance degradation and representation collapse. To address this dilemma, we propose an information-theory-guided principle, Robust Graph Information Bottleneck (RGIB), to extract reliable supervision signals and avoid representation collapse. Different from the basic information bottleneck, RGIB further decouples and balances the mutual dependence among graph topology, target labels, and representation, building new learning objectives for robust representation against the bilateral noise. Two instantiations, RGIB-SSL and RGIB-REP, are explored to leverage the merits of different methodologies, i.e., self-supervised learning and data reparameterization, for implicit and explicit data denoising, respectively. Extensive experiments on six datasets and three GNNs with diverse noisy scenarios verify the effectiveness of our RGIB instantiations. The code is publicly available at: https://github.com/tmlr-group/RGIB.