GMSF: Global Matching Scene Flow
{kind=link}
Abstract
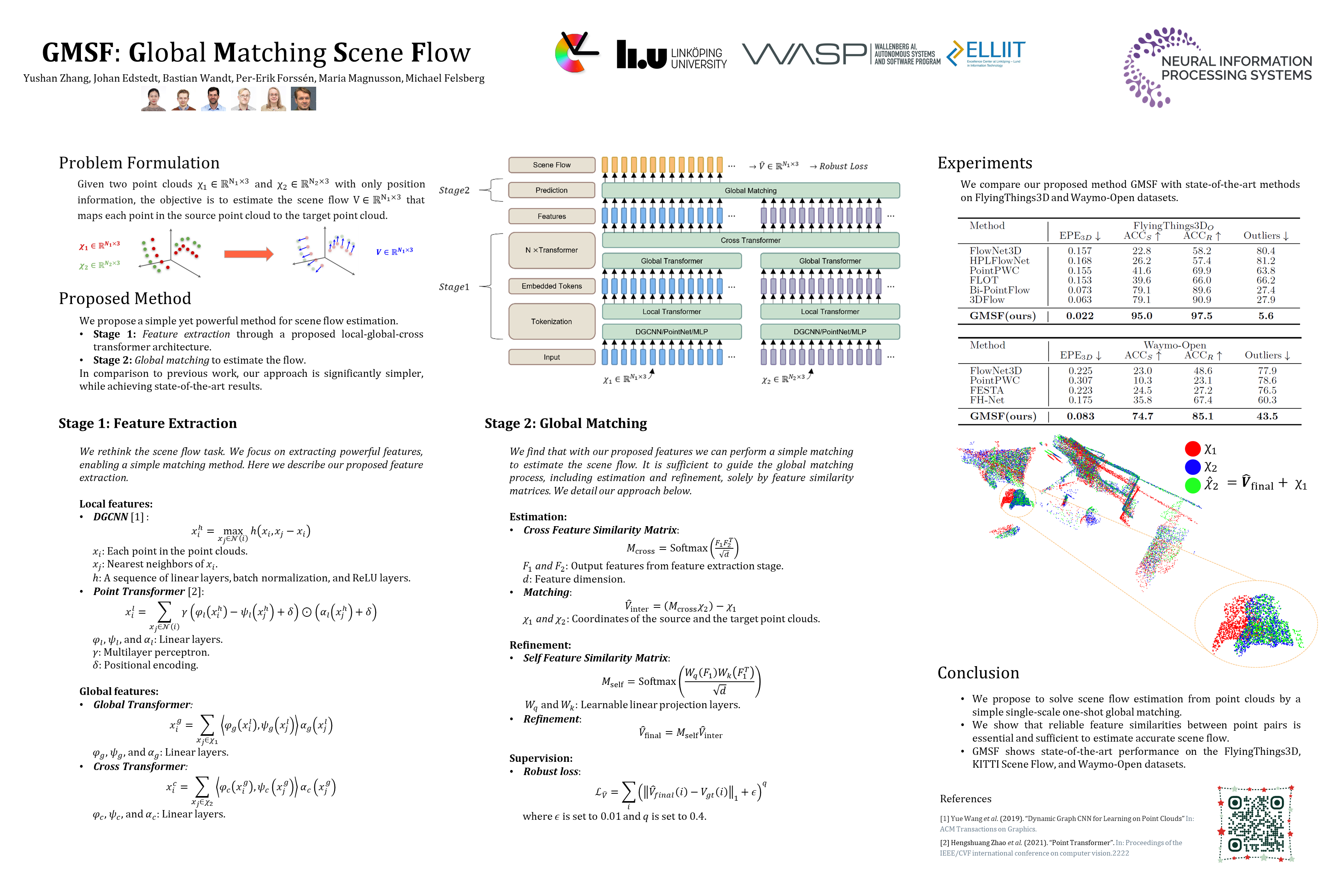
We tackle the task of scene flow estimation from point clouds. Given a source and a target point cloud, the objective is to estimate a translation from each point in the source point cloud to the target, resulting in a 3D motion vector field. Previous dominant scene flow estimation methods require complicated coarse-to-fine or recurrent architectures as a multi-stage refinement. In contrast, we propose a significantly simpler single-scale one-shot global matching to address the problem. Our key finding is that reliable feature similarity between point pairs is essential and sufficient to estimate accurate scene flow. We thus propose to decompose the feature extraction step via a hybrid local-global-cross transformer architecture which is crucial to accurate and robust feature representations. Extensive experiments show that the proposed Global Matching Scene Flow (GMSF) sets a new state-of-the-art on multiple scene flow estimation benchmarks. On FlyingThings3D, with the presence of occlusion points, GMSF reduces the outlier percentage from the previous best performance of 27.4% to 5.6%. On KITTI Scene Flow, without any fine-tuning, our proposed method shows state-of-the-art performance. On the Waymo-Open dataset, the proposed method outperforms previous methods by a large margin. The code is available at https://github.com/ZhangYushan3/GMSF.