3D Copy-Paste: Physically Plausible Object Insertion for Monocular 3D Detection
{kind=link}
Abstract
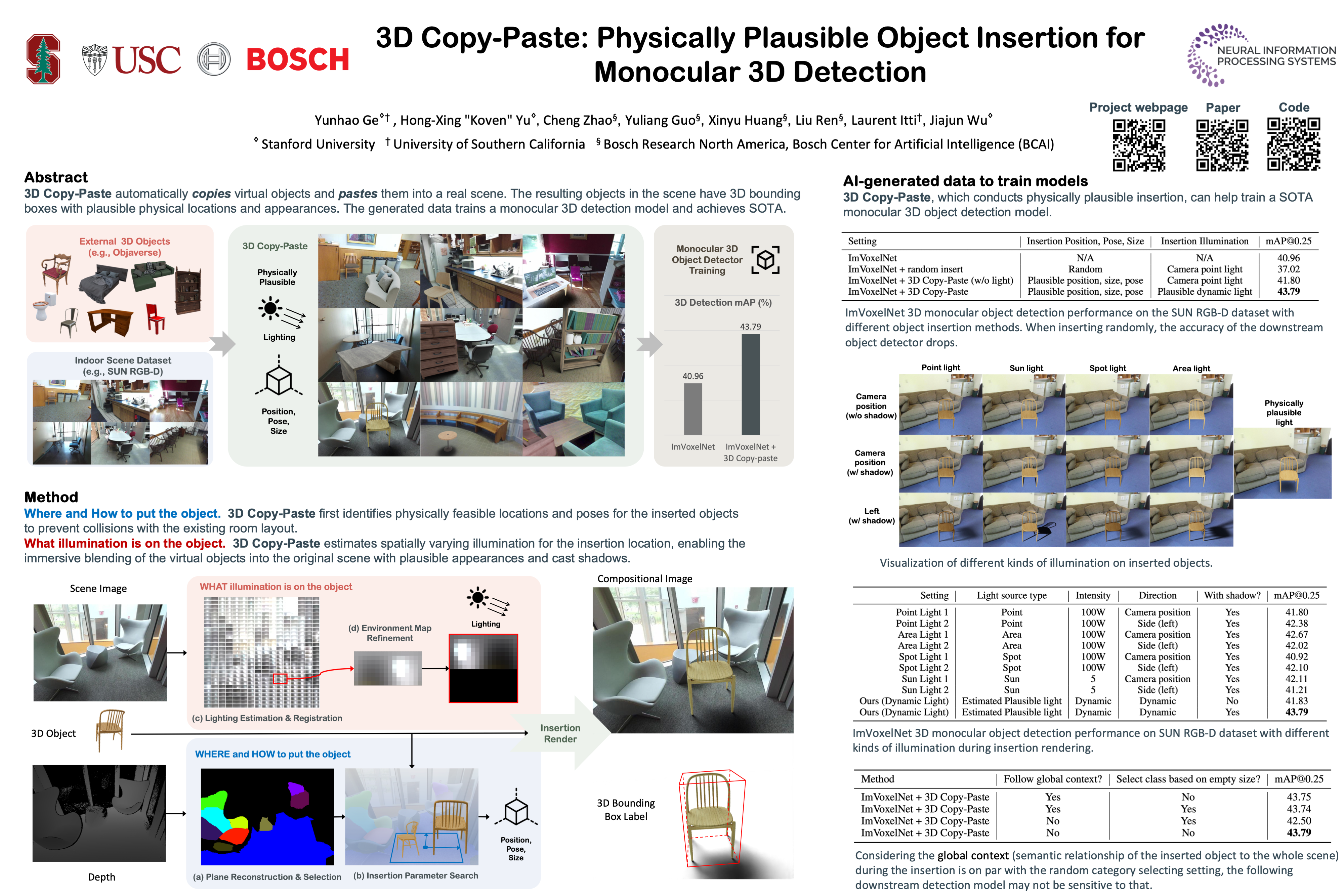
A major challenge in monocular 3D object detection is the limited diversity and quantity of objects in real datasets. While augmenting real scenes with virtual objects holds promise to improve both the diversity and quantity of the objects, it remains elusive due to the lack of an effective 3D object insertion method in complex real captured scenes. In this work, we study augmenting complex real indoor scenes with virtual objects for monocular 3D object detection. The main challenge is to automatically identify plausible physical properties for virtual assets (e.g., locations, appearances, sizes, etc.) in cluttered real scenes. To address this challenge, we propose a physically plausible indoor 3D object insertion approach to automatically copy virtual objects and paste them into real scenes. The resulting objects in scenes have 3D bounding boxes with plausible physical locations and appearances. In particular, our method first identifies physically feasible locations and poses for the inserted objects to prevent collisions with the existing room layout. Subsequently, it estimates spatially-varying illumination for the insertion location, enabling the immersive blending of the virtual objects into the original scene with plausible appearances and cast shadows. We show that our augmentation method significantly improves existing monocular 3D object models and achieves state-of-the-art performance. For the first time, we demonstrate that a physically plausible 3D object insertion, serving as a generative data augmentation technique, can lead to significant improvements for discriminative downstream tasks such as monocular 3D object detection. Project website: https://gyhandy.github.io/3D-Copy-Paste/.