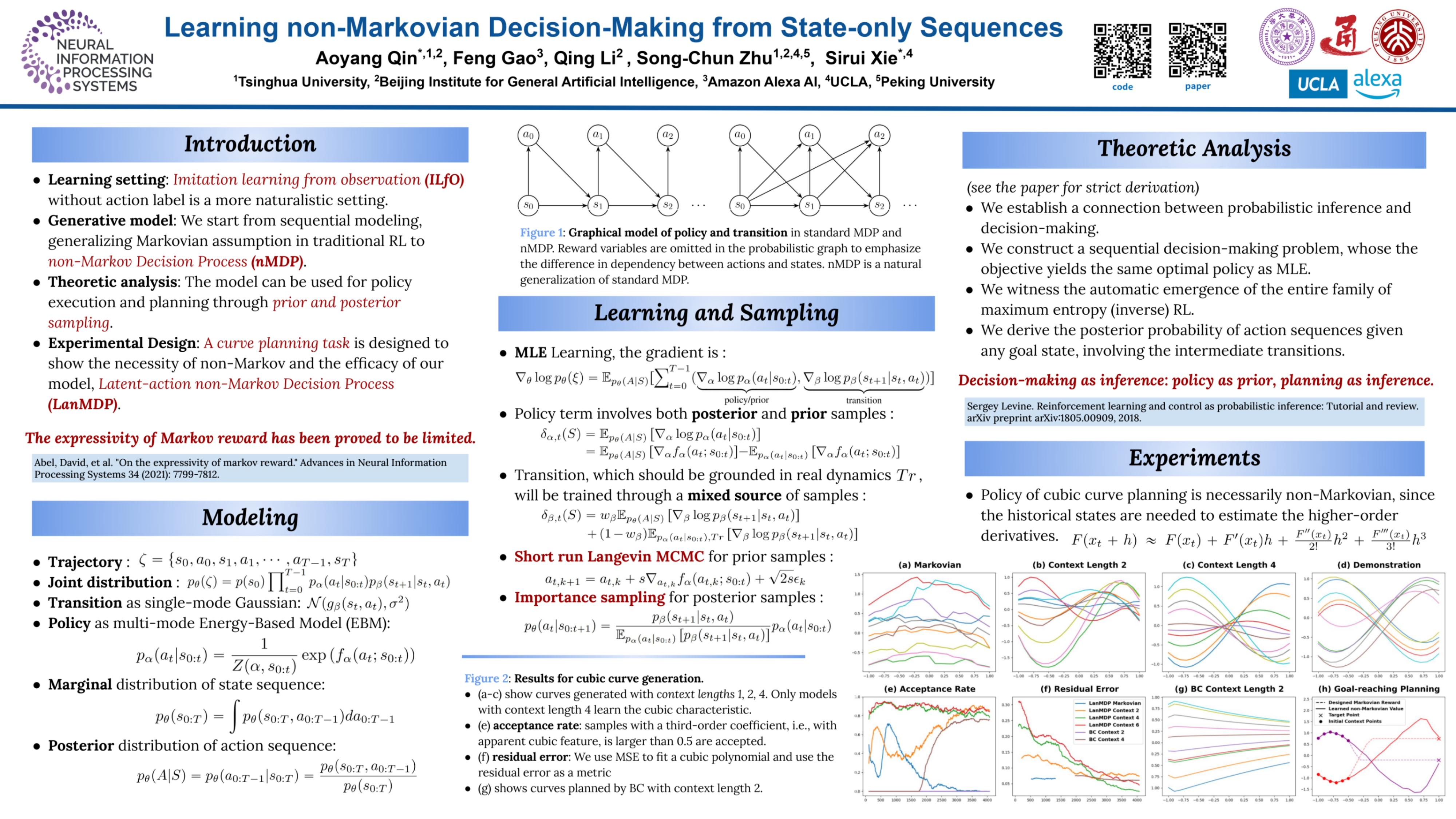
Learning non-Markovian Decision-Making from State-only Sequences
Aoyang Qin ⋅ Feng Gao ⋅ Qing Li ⋅ Song-Chun Zhu ⋅ Sirui Xie
2023 Poster
{kind=link}
Abstract
Conventional imitation learning assumes access to the actions of demonstrators, but these motor signals are often non-observable in naturalistic settings. Additionally, sequential decision-making behaviors in these settings can deviate from the assumptions of a standard Markov Decision Process (MDP). To address these challenges, we explore deep generative modeling of state-only sequences with non-Markov Decision Process (nMDP), where the policy is an energy-based prior in the latent space of the state transition generator. We develop maximum likelihood estimation to achieve model-based imitation, which involves short-run MCMC sampling from the prior and importance sampling for the posterior. The learned model enables $\textit{decision-making as inference}$: model-free policy execution is equivalent to prior sampling, model-based planning is posterior sampling initialized from the policy. We demonstrate the efficacy of the proposed method in a prototypical path planning task with non-Markovian constraints and show that the learned model exhibits strong performances in challenging domains from the MuJoCo suite.
Video
Chat is not available.
Successful Page Load