Depth-discriminative Metric Learning for Monocular 3D Object Detection
Wonhyeok Choi ⋅ Mingyu Shin ⋅ Sunghoon Im
2023 Poster
{kind=link}
Abstract
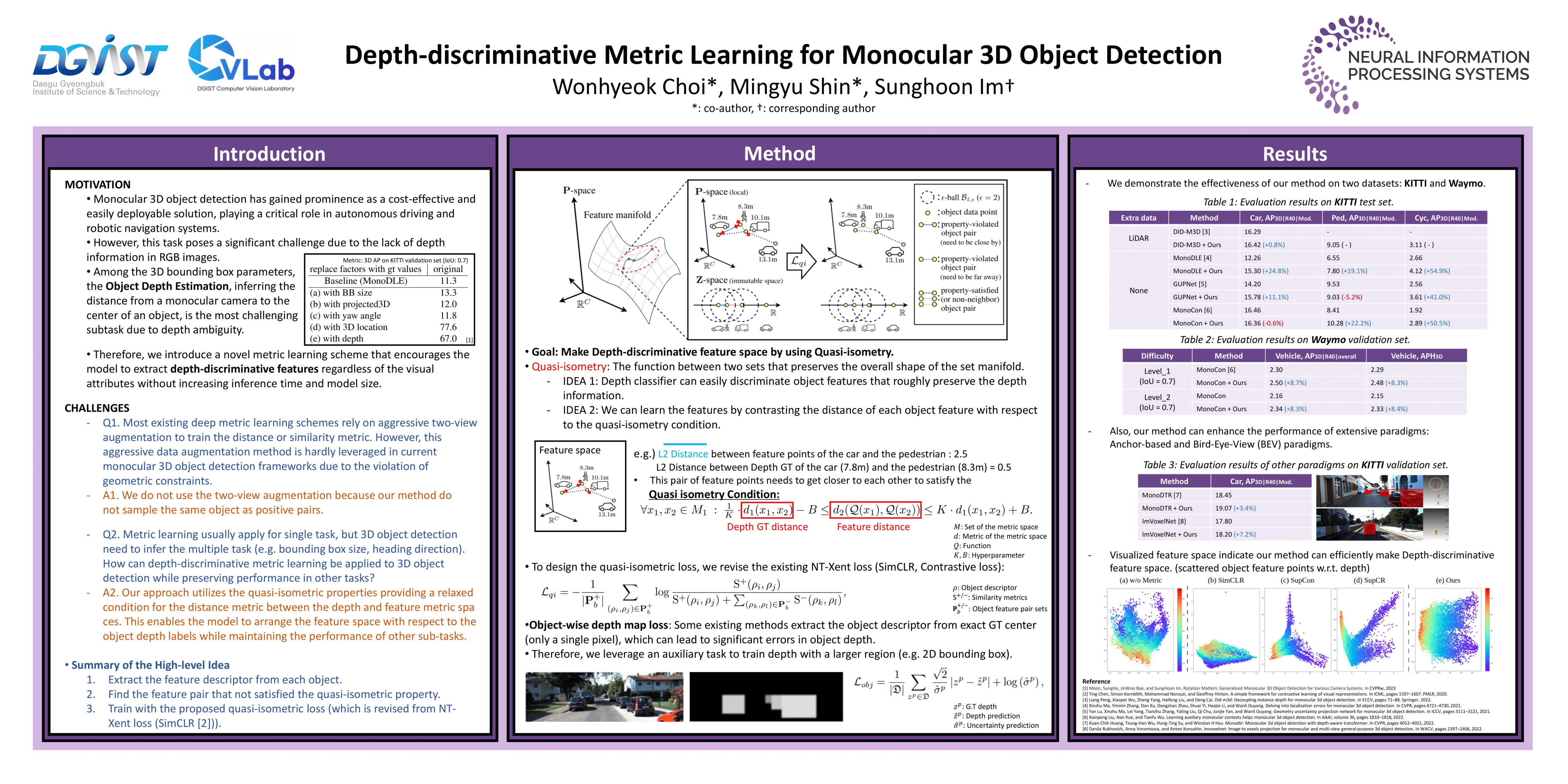
Monocular 3D object detection poses a significant challenge due to the lack of depth information in RGB images. Many existing methods strive to enhance the object depth estimation performance by allocating additional parameters for object depth estimation, utilizing extra modules or data. In contrast, we introduce a novel metric learning scheme that encourages the model to extract depth-discriminative features regardless of the visual attributes without increasing inference time and model size. Our method employs the distance-preserving function to organize the feature space manifold in relation to ground-truth object depth. The proposed $(K,B,\epsilon)$-quasi-isometric loss leverages predetermined pairwise distance restriction as guidance for adjusting the distance among object descriptors without disrupting the non-linearity of the natural feature manifold. Moreover, we introduce an auxiliary head for object-wise depth estimation, which enhances depth quality while maintaining the inference time. The broad applicability of our method is demonstrated through experiments that show improvements in overall performance when integrated into various baselines. The results show that our method consistently improves the performance of various baselines by 23.51\% and 5.78\% on average across KITTI and Waymo, respectively.
Video
Chat is not available.
Successful Page Load