MoVie: Visual Model-Based Policy Adaptation for View Generalization
Sizhe Yang ⋅ Yanjie Ze ⋅ Yanjie Ze ⋅ Huazhe Xu
2023 Poster
{kind=link}
Abstract
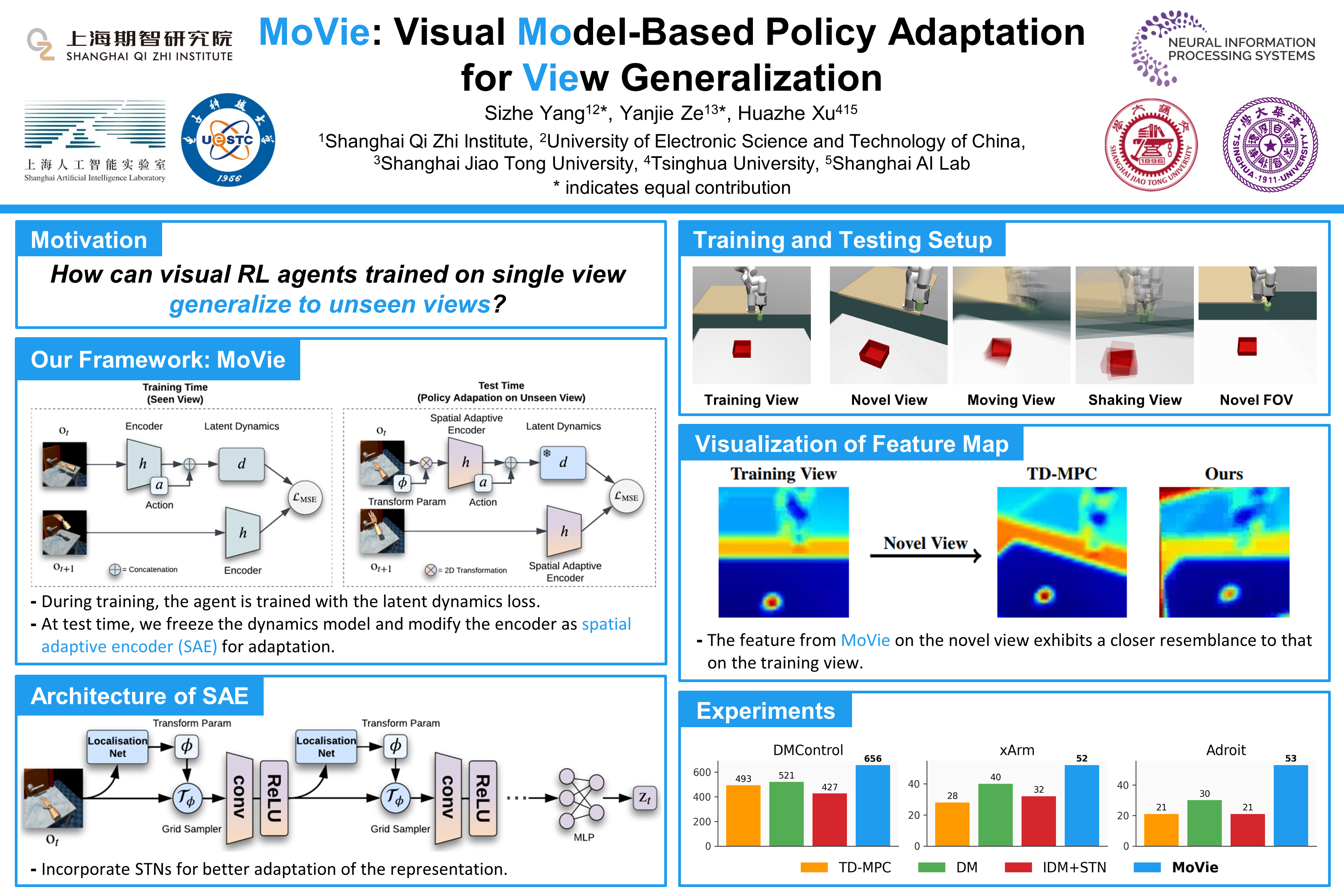
Visual Reinforcement Learning (RL) agents trained on limited views face significant challenges in generalizing their learned abilities to unseen views. This inherent difficulty is known as the problem of $\textit{view generalization}$. In this work, we systematically categorize this fundamental problem into four distinct and highly challenging scenarios that closely resemble real-world situations. Subsequently, we propose a straightforward yet effective approach to enable successful adaptation of visual $\textbf{Mo}$del-based policies for $\textbf{Vie}$w generalization ($\textbf{MoVie}$) during test time, without any need for explicit reward signals and any modification during training time. Our method demonstrates substantial advancements across all four scenarios encompassing a total of $\textbf{18}$ tasks sourced from DMControl, xArm, and Adroit, with a relative improvement of $\mathbf{33}$%, $\mathbf{86}$%, and $\mathbf{152}$% respectively. The superior results highlight the immense potential of our approach for real-world robotics applications. Code and videos are available at https://yangsizhe.github.io/MoVie/.
Video
Chat is not available.
Successful Page Load