Mixed-Initiative Multiagent Apprenticeship Learning for Human Training of Robot Teams
{kind=link}
Abstract
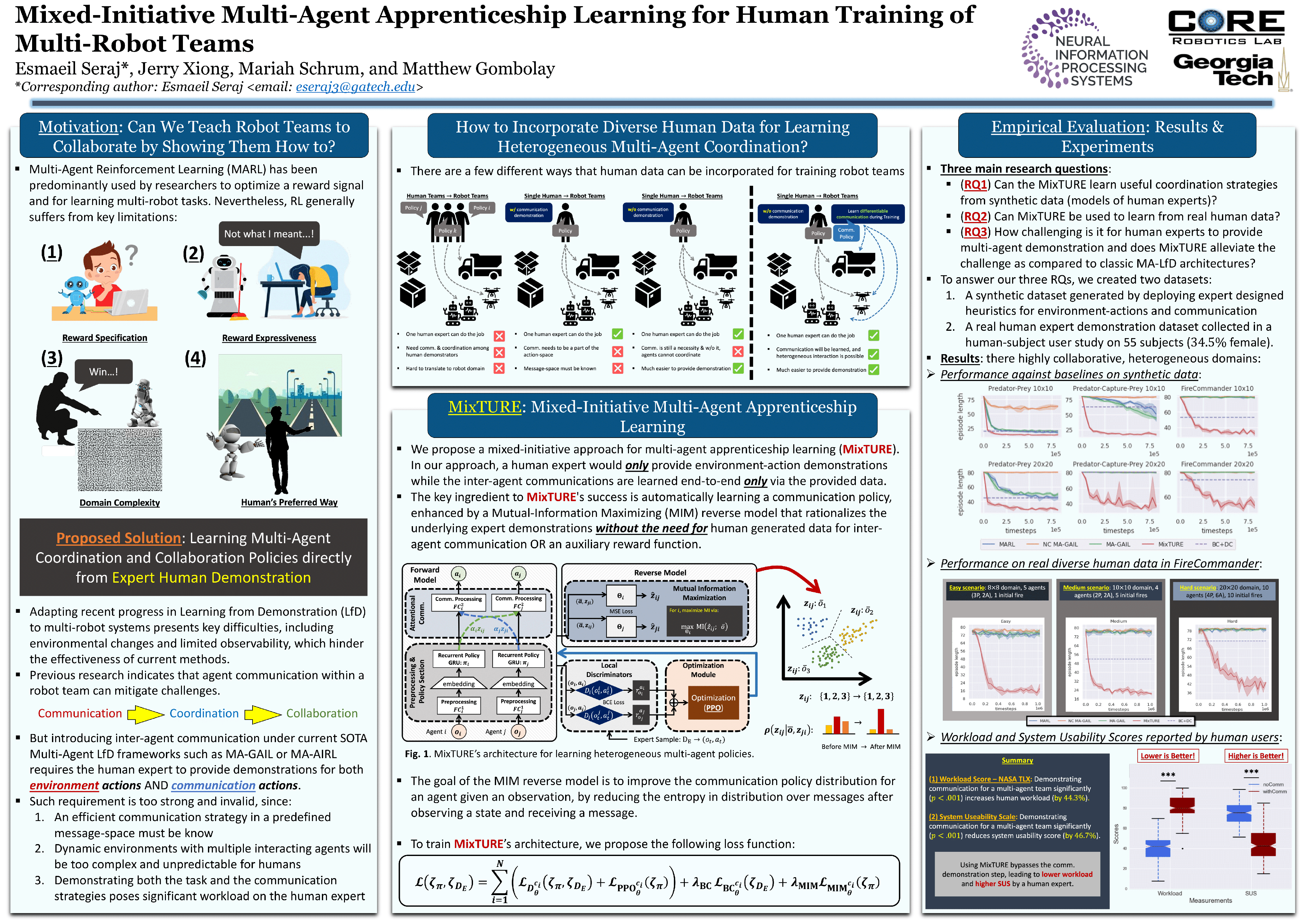
Extending recent advances in Learning from Demonstration (LfD) frameworks to multi-robot settings poses critical challenges such as environment non-stationarity due to partial observability which is detrimental to the applicability of existing methods. Although prior work has shown that enabling communication among agents of a robot team can alleviate such issues, creating inter-agent communication under existing Multi-Agent LfD (MA-LfD) frameworks requires the human expert to provide demonstrations for both environment actions and communication actions, which necessitates an efficient communication strategy on a known message spaces. To address this problem, we propose Mixed-Initiative Multi-Agent Apprenticeship Learning (MixTURE). MixTURE enables robot teams to learn from a human expert-generated data a preferred policy to accomplish a collaborative task, while simultaneously learning emergent inter-agent communication to enhance team coordination. The key ingredient to MixTURE's success is automatically learning a communication policy, enhanced by a mutual-information maximizing reverse model that rationalizes the underlying expert demonstrations without the need for human generated data or an auxiliary reward function. MixTURE outperforms a variety of relevant baselines on diverse data generated by human experts in complex heterogeneous domains. MixTURE is the first MA-LfD framework to enable learning multi-robot collaborative policies directly from real human data, resulting in ~44% less human workload, and ~46% higher usability score.