Last-Iterate Convergent Policy Gradient Primal-Dual Methods for Constrained MDPs
{kind=link}
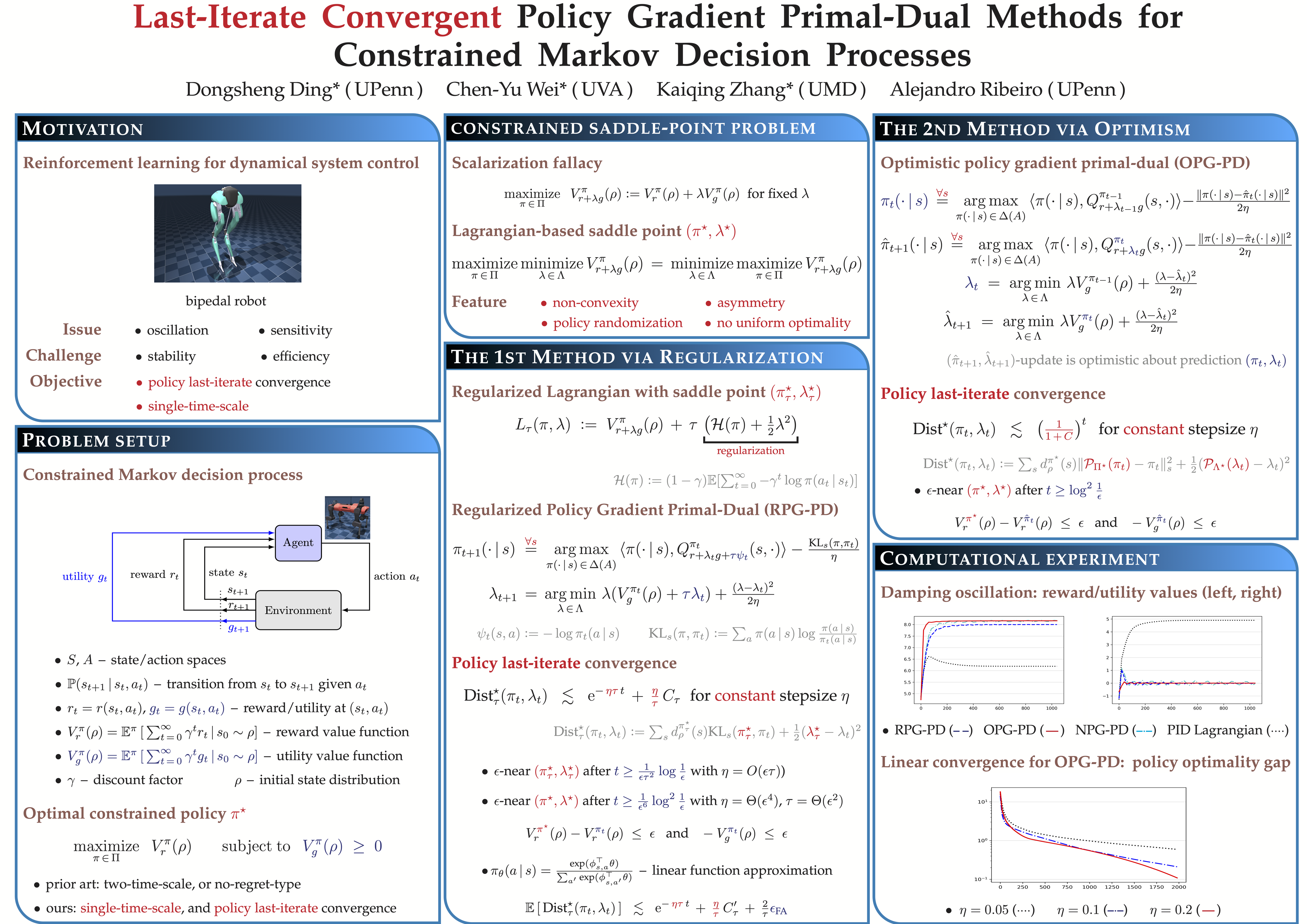
Abstract
We study the problem of computing an optimal policy of an infinite-horizon discounted constrained Markov decision process (constrained MDP). Despite the popularity of Lagrangian-based policy search methods used in practice, the oscillation of policy iterates in these methods has not been fully understood, bringing out issues such as violation of constraints and sensitivity to hyper-parameters. To fill this gap, we employ the Lagrangian method to cast a constrained MDP into a constrained saddle-point problem in which max/min players correspond to primal/dual variables, respectively, and develop two single-time-scale policy-based primal-dual algorithms with non-asymptotic convergence of their policy iterates to an optimal constrained policy. Specifically, we first propose a regularized policy gradient primal-dual (RPG-PD) method that updates the policy using an entropy-regularized policy gradient, and the dual variable via a quadratic-regularized gradient ascent, simultaneously. We prove that the policy primal-dual iterates of RPG-PD converge to a regularized saddle point with a sublinear rate, while the policy iterates converge sublinearly to an optimal constrained policy. We further instantiate RPG-PD in large state or action spaces by including function approximation in policy parametrization, and establish similar sublinear last-iterate policy convergence. Second, we propose an optimistic policy gradient primal-dual (OPG-PD) method that employs the optimistic gradient method to update primal/dual variables, simultaneously. We prove that the policy primal-dual iterates of OPG-PD converge to a saddle point that contains an optimal constrained policy, with a linear rate. To the best of our knowledge, this work appears to be the first non-asymptotic policy last-iterate convergence result for single-time-scale algorithms in constrained MDPs. We further validate the merits and the effectiveness of our methods in computational experiments.