Bayesian Risk-Averse Q-Learning with Streaming Observations
{kind=link}
Abstract
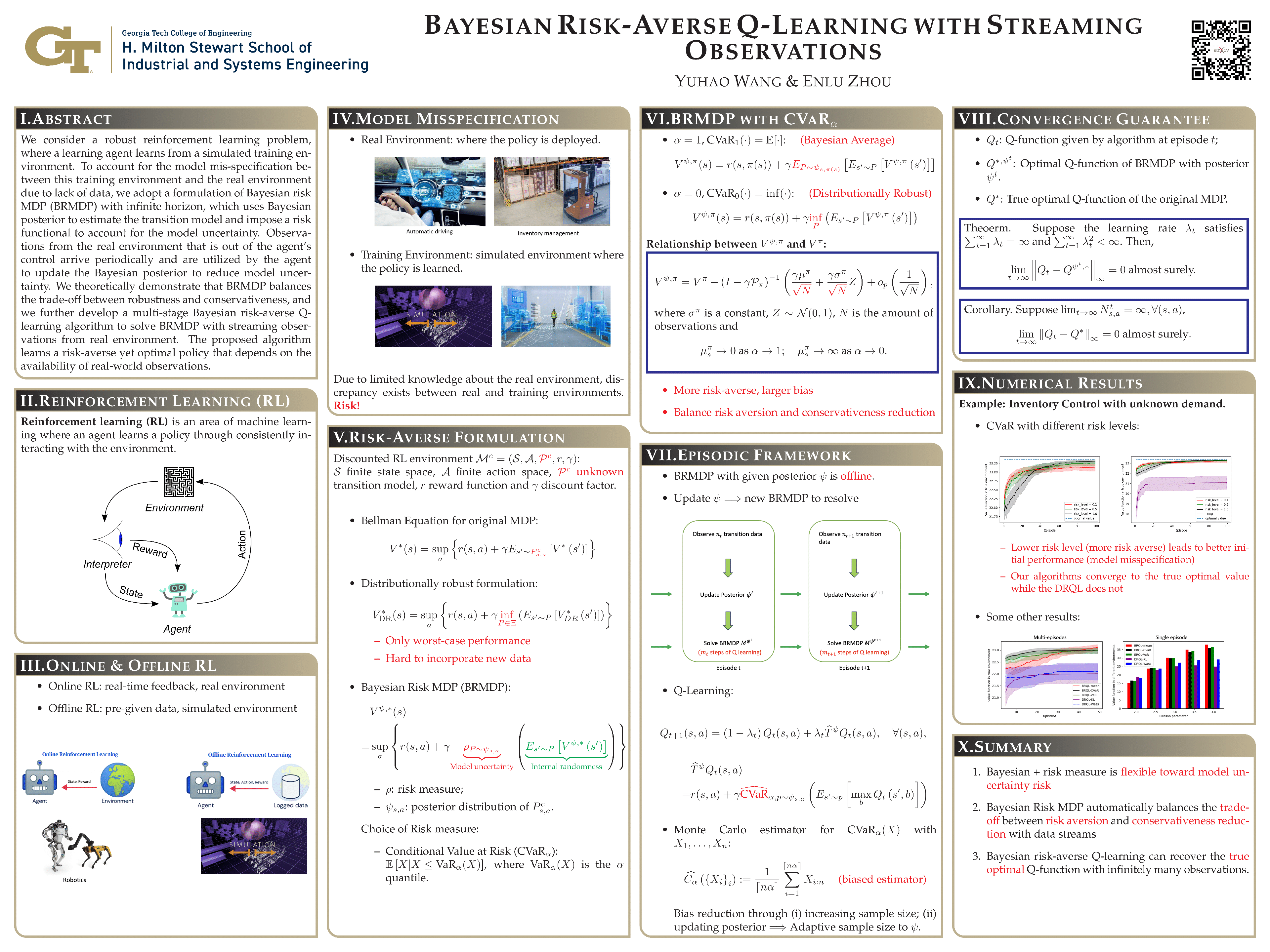
We consider a robust reinforcement learning problem, where a learning agent learns from a simulated training environment. To account for the model mis-specification between this training environment and the true environment due to lack of data, we adopt a formulation of Bayesian risk MDP (BRMDP) with infinite horizon, which uses Bayesian posterior to estimate the transition model and impose a risk functional to account for the model uncertainty. Observations from the real environment that is out of the agent's control arrive periodically and are utilized by the agent to update the Bayesian posterior to reduce model uncertainty. We theoretically demonstrate that BRMDP balances the trade-off between robustness and conservativeness, and we further develop a multi-stage Bayesian risk-averse Q-learning algorithm to solve BRMDP with streaming observations from real environment. The proposed algorithm learns a risk-averse yet optimal policy that depends on the availability of real-world observations. We provide a theoretical guarantee of strong convergence for the proposed algorithm.