A Partially-Supervised Reinforcement Learning Framework for Visual Active Search
{kind=link}
Abstract
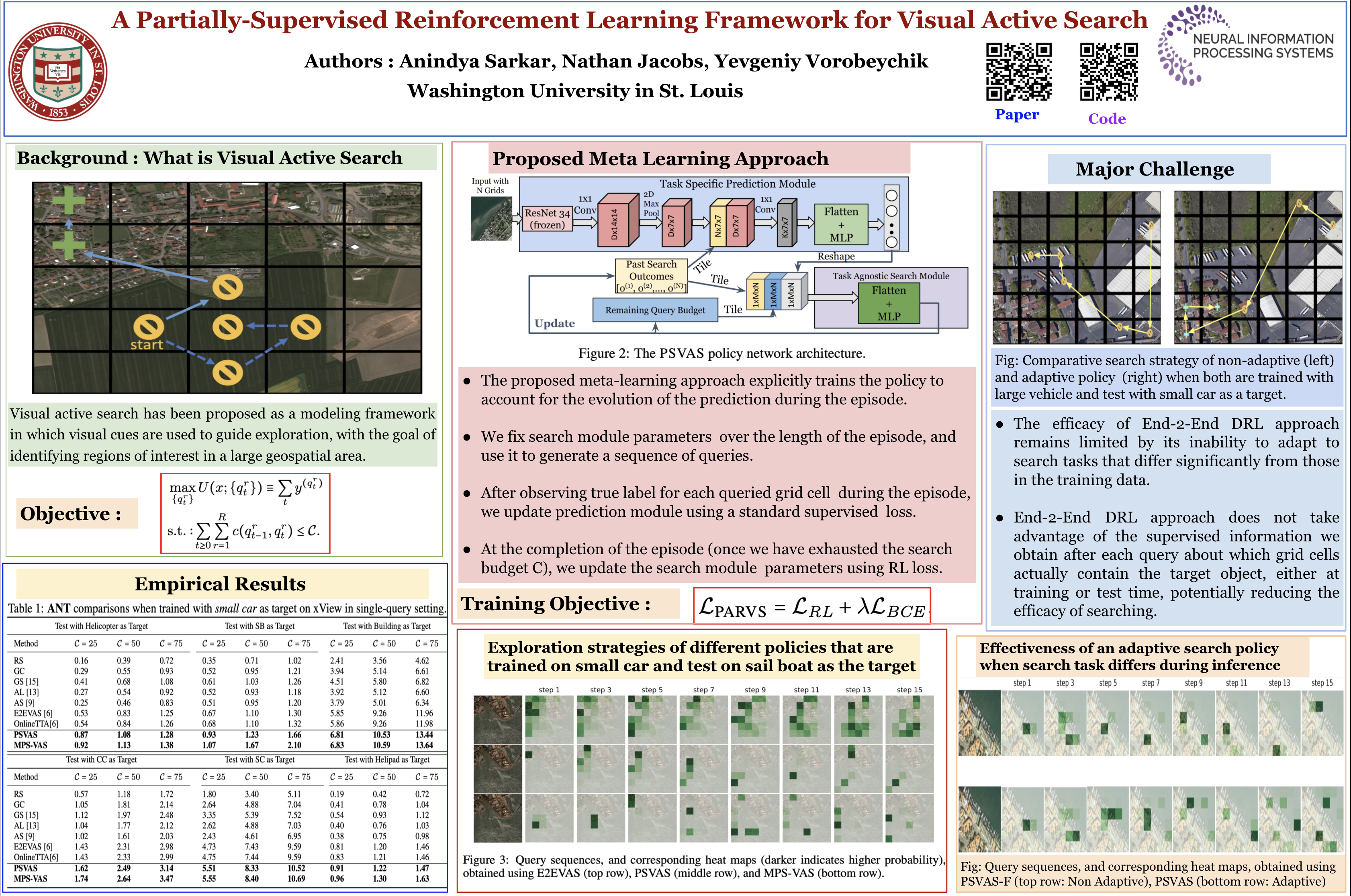
Visual active search (VAS) has been proposed as a modeling framework in which visual cues are used to guide exploration, with the goal of identifying regions of interest in a large geospatial area. Its potential applications include identifying hot spots of rare wildlife poaching activity, search-and-rescue scenarios, identifying illegal trafficking of weapons, drugs, or people, and many others. State of the art approaches to VAS include applications of deep reinforcement learning (DRL), which yield end-to-end search policies, and traditional active search, which combines predictions with custom algorithmic approaches. While the DRL framework has been shown to greatly outperform traditional active search in such domains, its end-to-end nature does not make full use of supervised information attained either during training, or during actual search, a significant limitation if search tasks differ significantly from those in the training distribution. We propose an approach that combines the strength of both DRL and conventional active search approaches by decomposing the search policy into a prediction module, which produces a geospatial distribution of regions of interest based on task embedding and search history, and a search module, which takes the predictions and search history as input and outputs the search distribution. In addition, we develop a novel meta-learning approach for jointly learning the resulting combined policy that can make effective use of supervised information obtained both at training and decision time. Our extensive experiments demonstrate that the proposed representation and meta-learning frameworks significantly outperform state of the art in visual active search on several problem domains.