Unified 3D Segmenter As Prototypical Classifiers
{kind=link}
Abstract
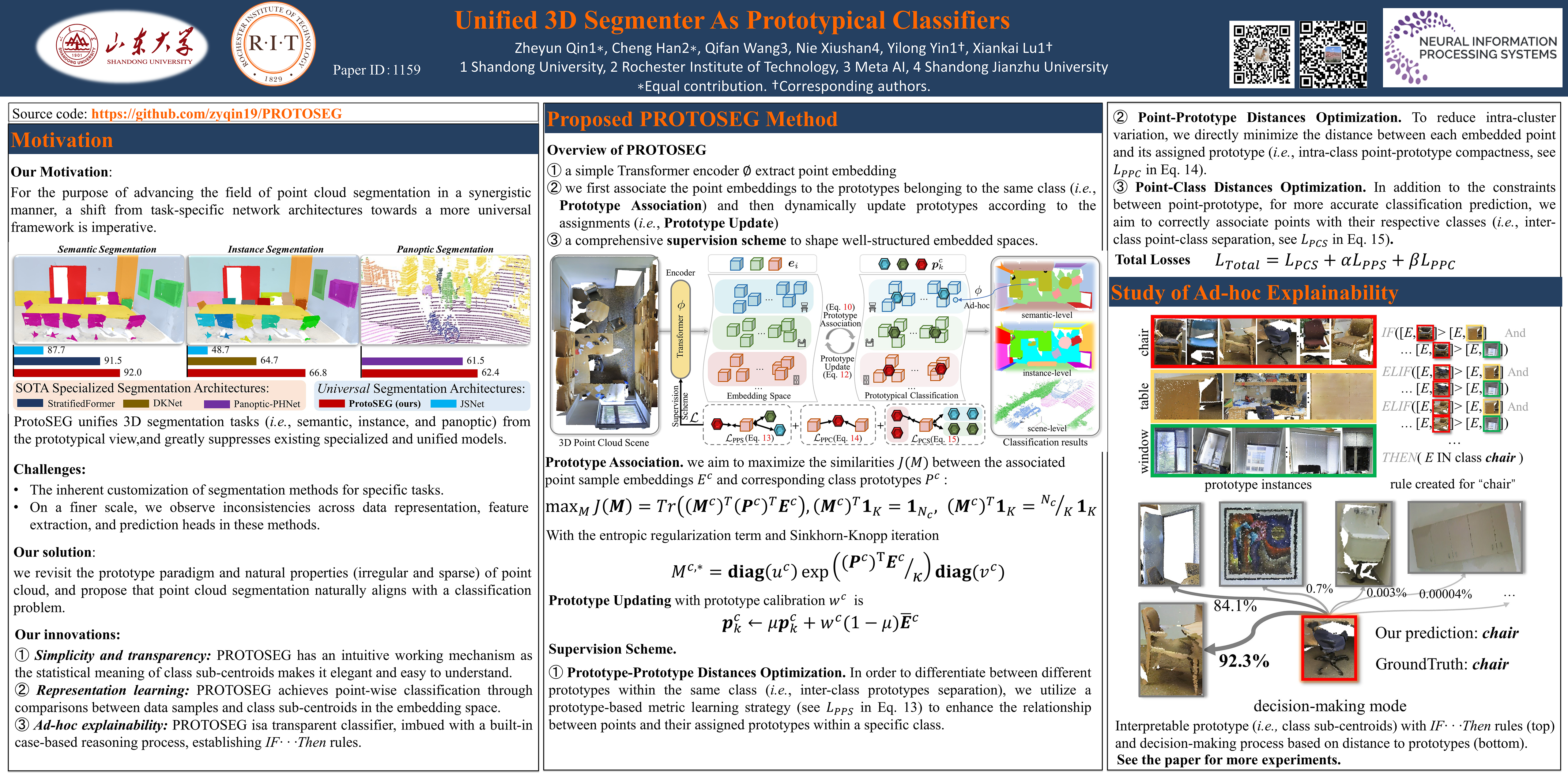
The task of point cloud segmentation, comprising semantic, instance, and panoptic segmentation, has been mainly tackled by designing task-specific network architectures, which often lack the flexibility to generalize across tasks, thus resulting in a fragmented research landscape. In this paper, we introduce ProtoSEG, a prototype-based model that unifies semantic, instance, and panoptic segmentation tasks. Our approach treats these three homogeneous tasks as a classification problem with different levels of granularity. By leveraging a Transformer architecture, we extract point embeddings to optimize prototype-class distances and dynamically learn class prototypes to accommodate the end tasks. Our prototypical design enjoys simplicity and transparency, powerful representational learning, and ad-hoc explainability. Empirical results demonstrate that ProtoSEG outperforms concurrent well-known specialized architectures on 3D point cloud benchmarks, achieving 72.3%, 76.4% and 74.2% mIoU for semantic segmentation on S3DIS, ScanNet V2 and SemanticKITTI, 66.8% mCov and 51.2% mAP for instance segmentation on S3DIS and ScanNet V2, 62.4% PQ for panoptic segmentation on SemanticKITTI, validating the strength of our concept and the effectiveness of our algorithm. The code and models are available at https://github.com/zyqin19/PROTOSEG.