Performance Bounds for Policy-Based Average Reward Reinforcement Learning Algorithms
Yashaswini Murthy ⋅ Mehrdad Moharrami ⋅ R. Srikant
2023 Poster
{kind=link}
Abstract
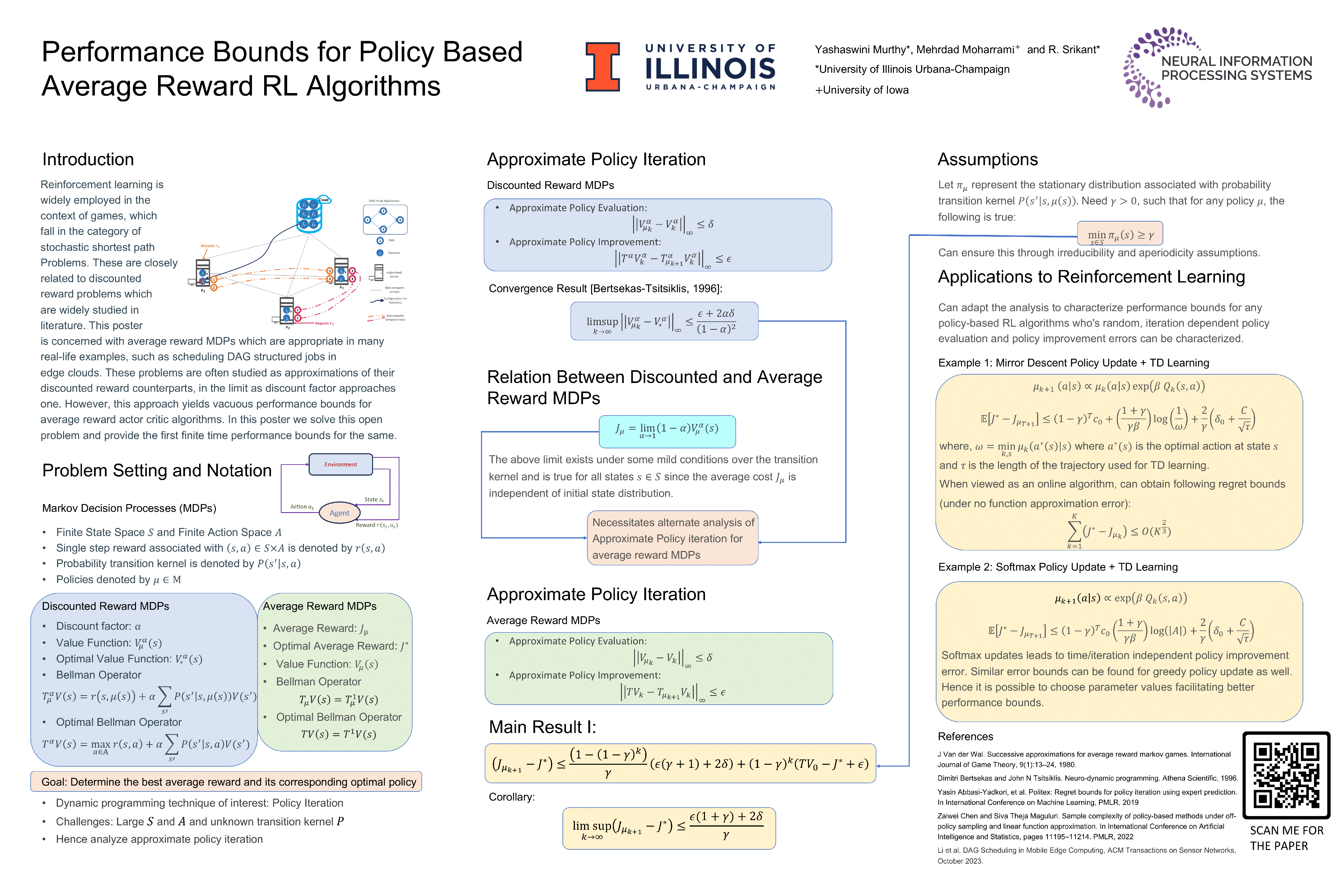
Many policy-based reinforcement learning (RL) algorithms can be viewed as instantiations of approximate policy iteration (PI), i.e., where policy improvement and policy evaluation are both performed approximately. In applications where the average reward objective is the meaningful performance metric, often discounted reward formulations are used with the discount factor being close to $1,$ which is equivalent to making the expected horizon very large. However, the corresponding theoretical bounds for error performance scale with the square of the horizon. Thus, even after dividing the total reward by the length of the horizon, the corresponding performance bounds for average reward problems go to infinity. Therefore, an open problem has been to obtain meaningful performance bounds for approximate PI and RL algorithms for the average-reward setting. In this paper, we solve this open problem by obtaining the first non-trivial finite time error bounds for average-reward MDPs which go to zero in the limit as policy evaluation and policy improvement errors go to zero.
Video
Chat is not available.
Successful Page Load