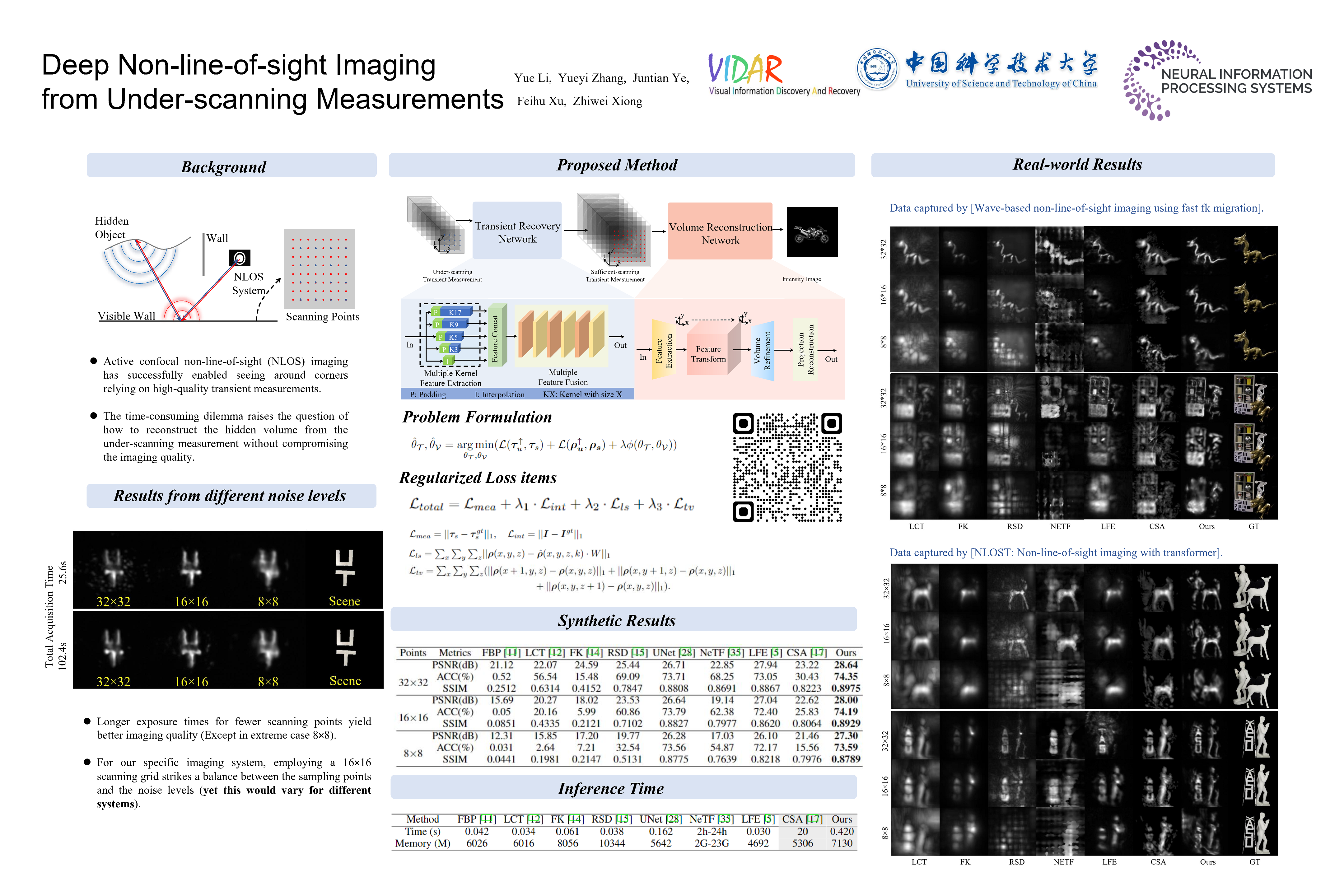
Deep Non-line-of-sight Imaging from Under-scanning Measurements
Yue Li ⋅ Yueyi Zhang ⋅ Juntian Ye ⋅ Feihu Xu ⋅ Zhiwei Xiong
2023 Poster
{kind=link}
Abstract
Active confocal non-line-of-sight (NLOS) imaging has successfully enabled seeing around corners relying on high-quality transient measurements. However, acquiring spatial-dense transient measurement is time-consuming, raising the question of how to reconstruct satisfactory results from under-scanning measurements (USM). The existing solutions, involving the traditional algorithms, however, are hindered by unsatisfactory results or long computing times. To this end, we propose the first deep-learning-based approach to NLOS imaging from USM. Our proposed end-to-end network is composed of two main components: the transient recovery network (TRN) and the volume reconstruction network (VRN). Specifically, TRN takes the under-scanning measurements as input, utilizes a multiple kernel feature extraction module and a multiple feature fusion module, and outputs sufficient-scanning measurements at the high-spatial resolution. Afterwards, VRN incorporates the linear physics prior of the light-path transport model and reconstructs the hidden volume representation. Besides, we introduce regularized constraints that enhance the perception of more local details while suppressing smoothing effects. The proposed method achieves superior performance on both synthetic data and public real-world data, as demonstrated by extensive experimental results with different under-scanning grids. Moreover, the proposed method delivers impressive robustness at an extremely low scanning grid (i.e., 8$\times$8) and offers high-speed inference (i.e., 50 times faster than the existing iterative solution).
Video
Chat is not available.
Successful Page Load