BCDiff: Bidirectional Consistent Diffusion for Instantaneous Trajectory Prediction
{kind=link}
Abstract
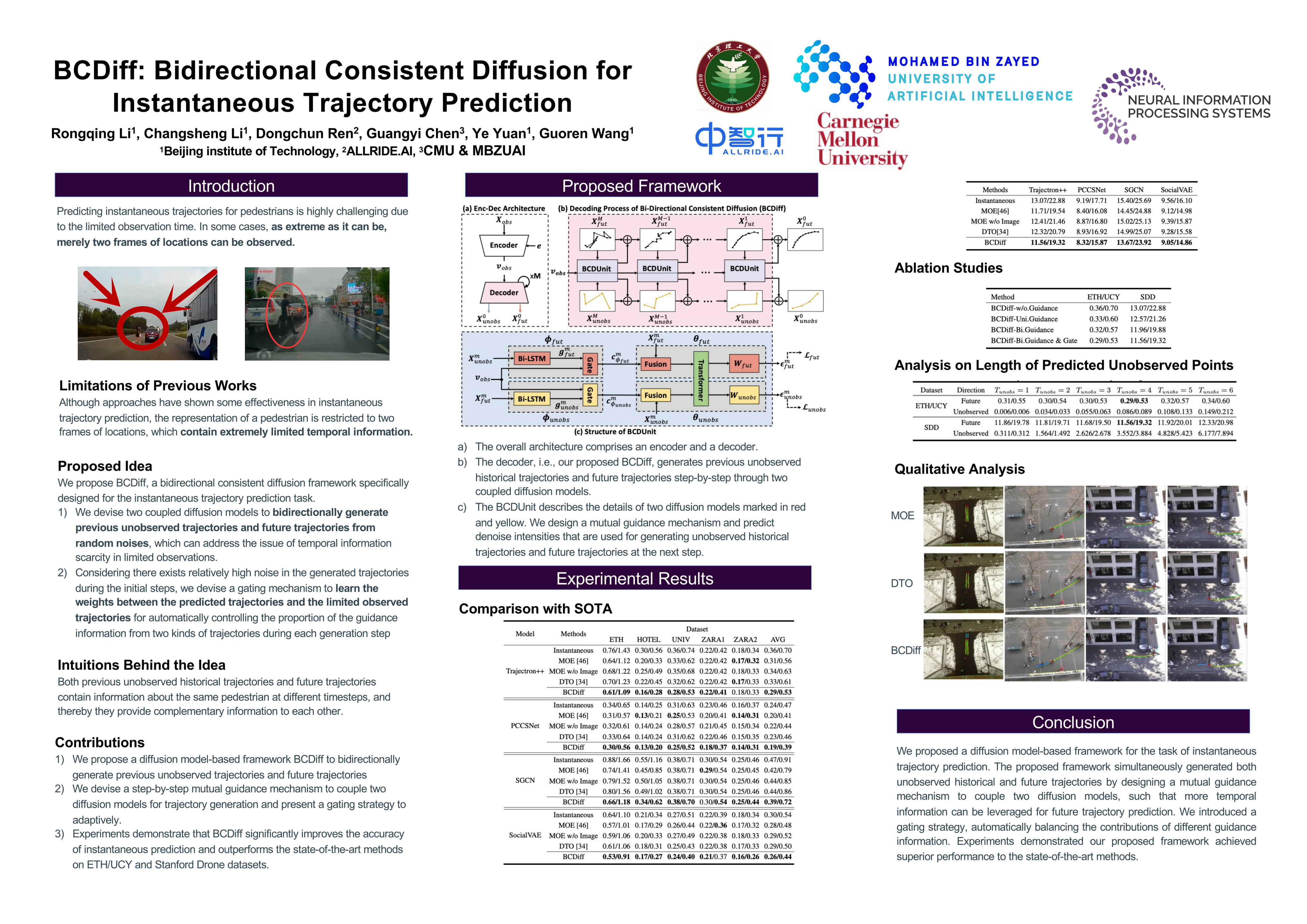
The objective of pedestrian trajectory prediction is to estimate the future paths of pedestrians by leveraging historical observations, which plays a vital role in ensuring the safety of self-driving vehicles and navigation robots. Previous works usually rely on a sufficient amount of observation time to accurately predict future trajectories. However, there are many real-world situations where the model lacks sufficient time to observe, such as when pedestrians abruptly emerge from blind spots, resulting in inaccurate predictions and even safety risks. Therefore, it is necessary to perform trajectory prediction based on instantaneous observations, which has rarely been studied before. In this paper, we propose a Bi-directional Consistent Diffusion framework tailored for instantaneous trajectory prediction, named BCDiff. At its heart, we develop two coupled diffusion models by designing a mutual guidance mechanism which can bidirectionally and consistently generate unobserved historical trajectories and future trajectories step-by-step, to utilize the complementary information between them. Specifically, at each step, the predicted unobserved historical trajectories and limited observed trajectories guide one diffusion model to generate future trajectories, while the predicted future trajectories and observed trajectories guide the other diffusion model to predict unobserved historical trajectories. Given the presence of relatively high noise in the generated trajectories during the initial steps, we introduce a gating mechanism to learn the weights between the predicted trajectories and the limited observed trajectories for automatically balancing their contributions. By means of this iterative and mutually guided generation process, both the future and unobserved historical trajectories undergo continuous refinement, ultimately leading to accurate predictions. Essentially, BCDiff is an encoder-free framework that can be compatible with existing trajectory prediction models in principle. Experiments show that our proposed BCDiff significantly improves the accuracy of instantaneous trajectory prediction on the ETH/UCY and Stanford Drone datasets, compared to related approaches.