Spiking PointNet: Spiking Neural Networks for Point Clouds
{kind=link}
Abstract
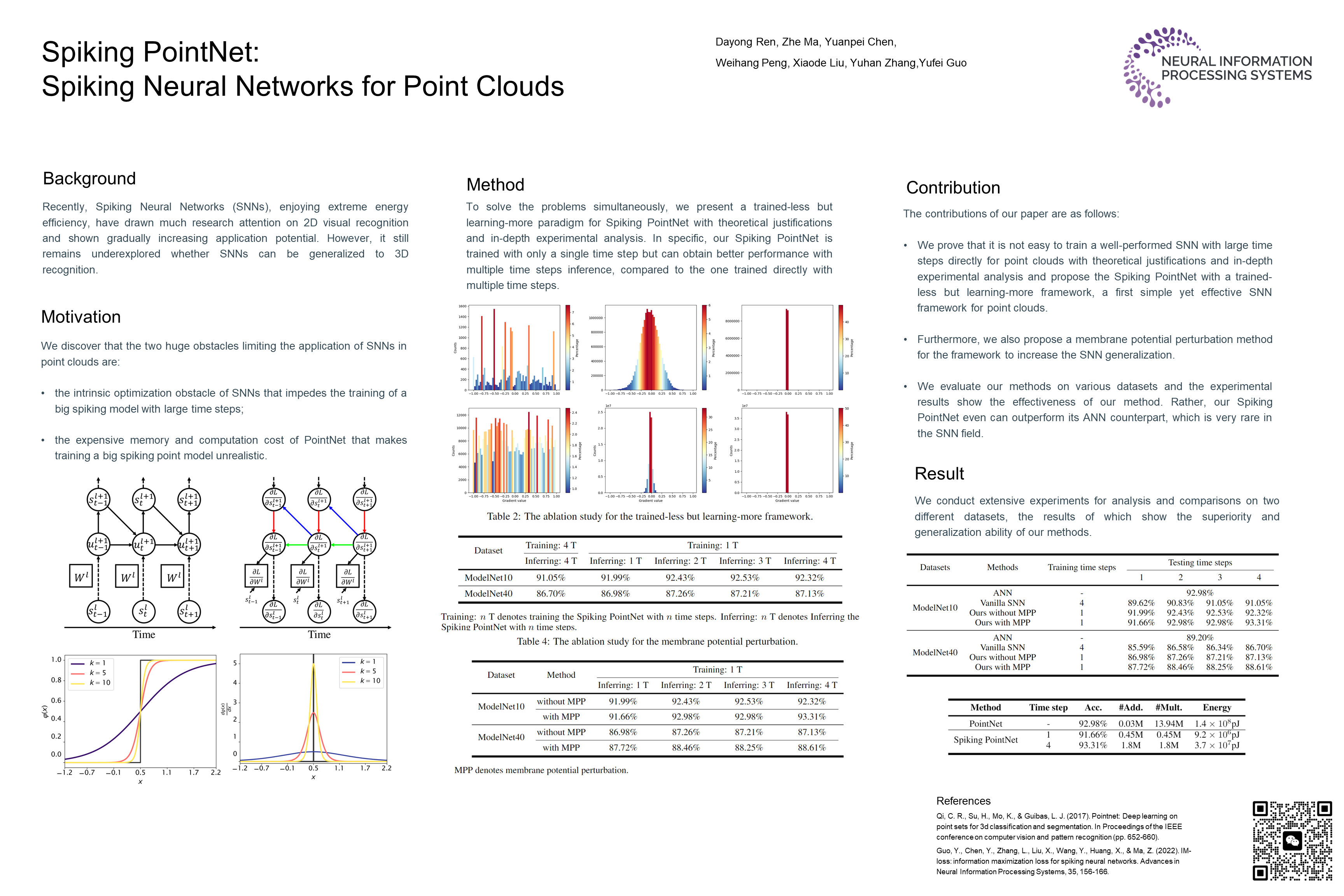
Recently, Spiking Neural Networks (SNNs), enjoying extreme energy efficiency, have drawn much research attention on 2D visual recognition and shown gradually increasing application potential. However, it still remains underexplored whether SNNs can be generalized to 3D recognition. To this end, we present Spiking PointNet in the paper, the first spiking neural model for efficient deep learning on point clouds. We discover that the two huge obstacles limiting the application of SNNs in point clouds are: the intrinsic optimization obstacle of SNNs that impedes the training of a big spiking model with large time steps, and the expensive memory and computation cost of PointNet that makes training a big spiking point model unrealistic. To solve the problems simultaneously, we present a trained-less but learning-more paradigm for Spiking PointNet with theoretical justifications and in-depth experimental analysis. In specific, our Spiking PointNet is trained with only a single time step but can obtain better performance with multiple time steps inference, compared to the one trained directly with multiple time steps. We conduct various experiments on ModelNet10, ModelNet40 to demonstrate the effectiveness of Sipiking PointNet. Notably, our Spiking PointNet even can outperform its ANN counterpart, which is rare in the SNN field thus providing a potential research direction for the following work. Moreover, Spiking PointNet shows impressive speedup and storage saving in the training phase. Our code is open-sourced at https://github.com/DayongRen/Spiking-PointNet.