Off-Policy Evaluation for Human Feedback
{kind=link}
Abstract
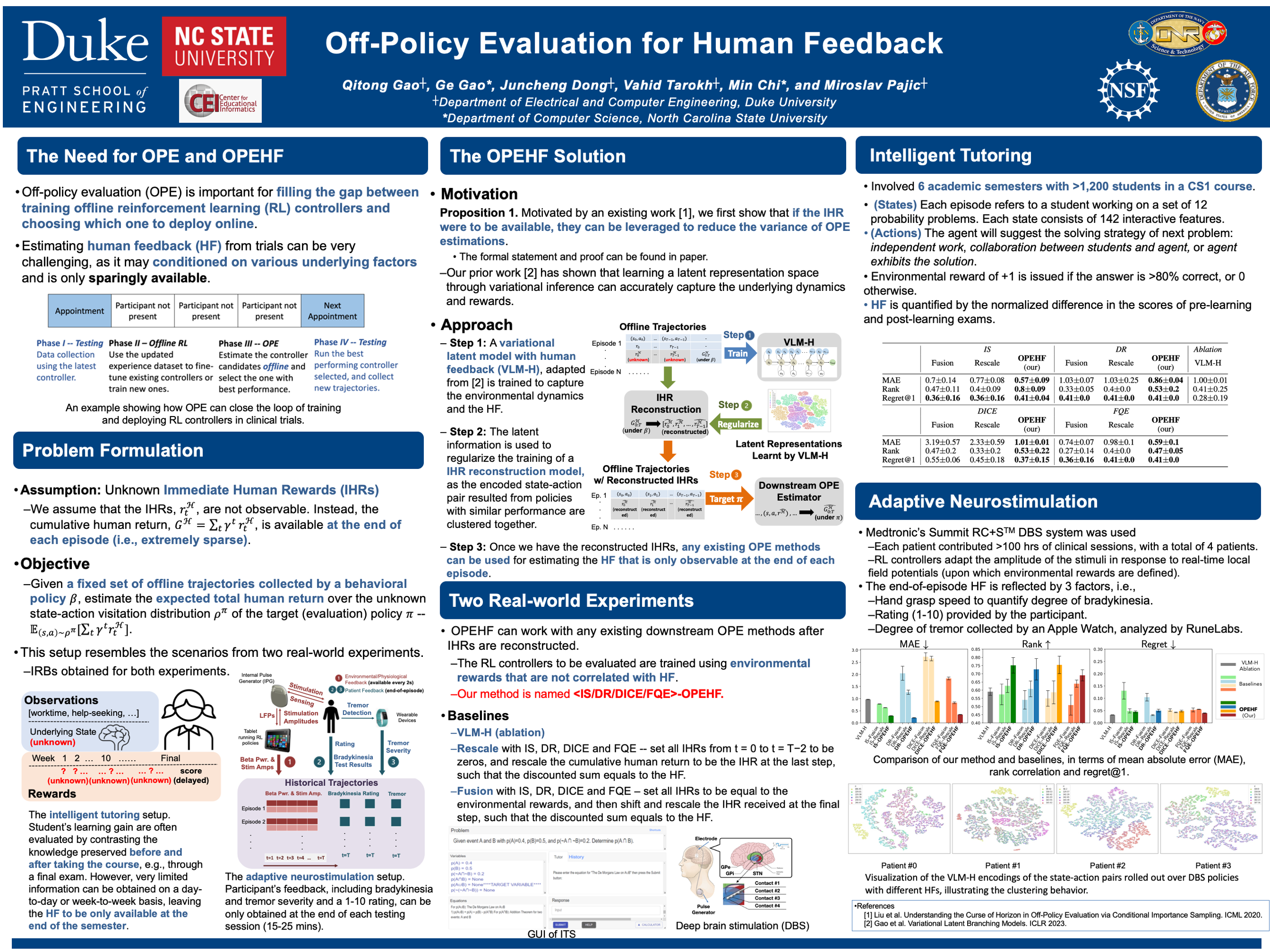
Off-policy evaluation (OPE) is important for closing the gap between offline training and evaluation of reinforcement learning (RL), by estimating performance and/or rank of target (evaluation) policies using offline trajectories only. It can improve the safety and efficiency of data collection and policy testing procedures in situations where online deployments are expensive, such as healthcare. However, existing OPE methods fall short in estimating human feedback (HF) signals, as HF may be conditioned over multiple underlying factors and are only sparsely available; as opposed to the agent-defined environmental rewards (used in policy optimization), which are usually determined over parametric functions or distributions. Consequently, the nature of HF signals makes extrapolating accurate OPE estimations to be challenging. To resolve this, we introduce an OPE for HF (OPEHF) framework that revives existing OPE methods in order to accurately evaluate the HF signals. Specifically, we develop an immediate human reward (IHR) reconstruction approach, regularized by environmental knowledge distilled in a latent space that captures the underlying dynamics of state transitions as well as issuing HF signals. Our approach has been tested over two real-world experiments, adaptive in-vivo neurostimulation and intelligent tutoring, and a simulation environment (visual Q&A). Results show that our approach significantly improves the performance toward estimating HF signals accurately, compared to directly applying (variants of) existing OPE methods.