Online Nonstochastic Model-Free Reinforcement Learning
{kind=link}
Abstract
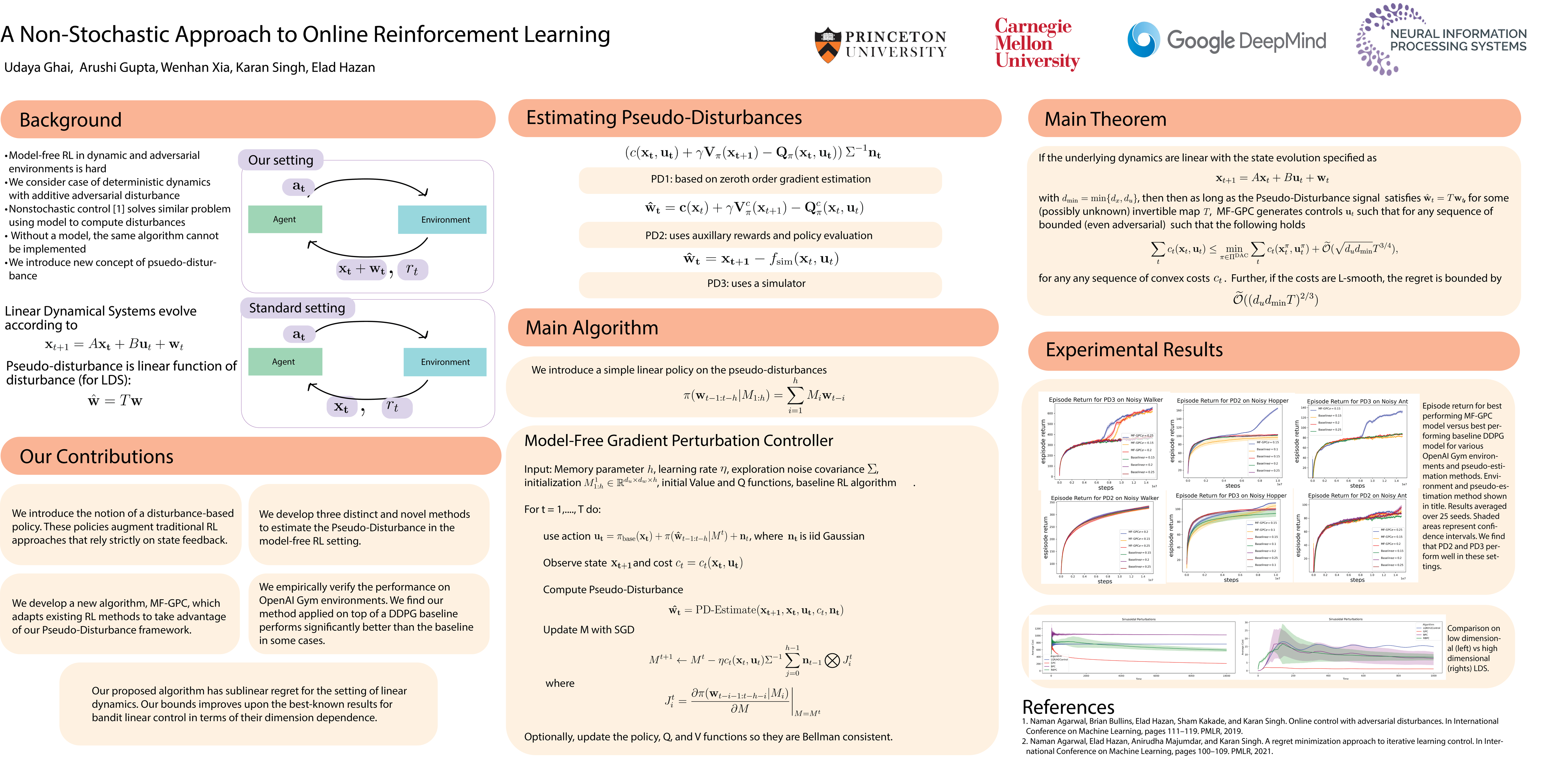
We investigate robust model-free reinforcement learning algorithms designed for environments that may be dynamic or even adversarial. Traditional state-based policies often struggle to accommodate the challenges imposed by the presence of unmodeled disturbances in such settings. Moreover, optimizing linear state-based policies pose an obstacle for efficient optimization, leading to nonconvex objectives, even in benign environments like linear dynamical systems.Drawing inspiration from recent advancements in model-based control, we intro- duce a novel class of policies centered on disturbance signals. We define several categories of these signals, which we term pseudo-disturbances, and develop corresponding policy classes based on them. We provide efficient and practical algorithms for optimizing these policies.Next, we examine the task of online adaptation of reinforcement learning agents in the face of adversarial disturbances. Our methods seamlessly integrate with any black-box model-free approach, yielding provable regret guarantees when dealing with linear dynamics. These regret guarantees unconditionally improve the best-known results for bandit linear control in having no dependence on the state-space dimension. We evaluate our method over various standard RL benchmarks and demonstrate improved robustness.