Neural Lyapunov Control for Discrete-Time Systems
{kind=link}
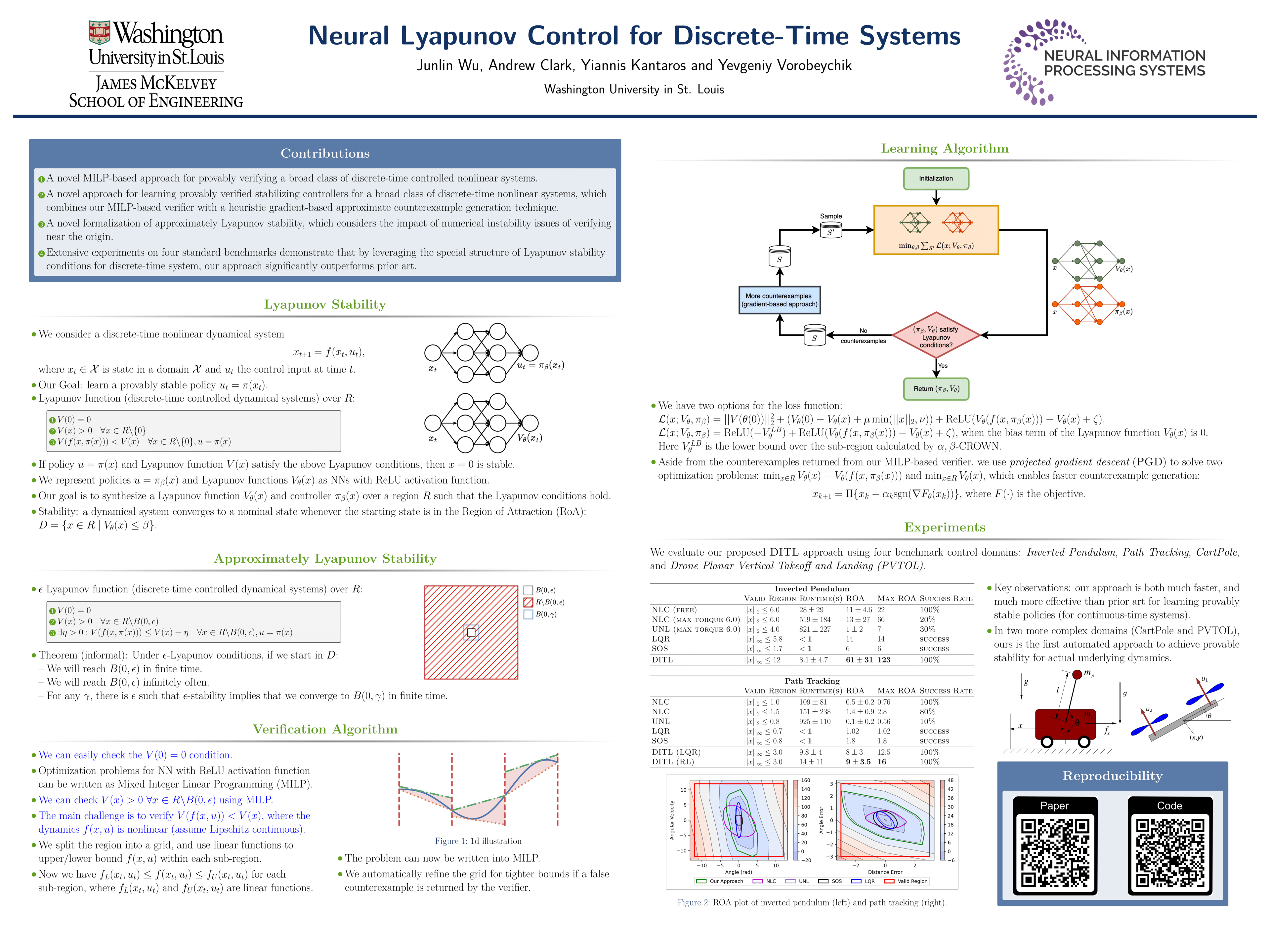
Abstract
While ensuring stability for linear systems is well understood, it remains a major challenge for nonlinear systems. A general approach in such cases is to compute a combination of a Lyapunov function and an associated control policy. However, finding Lyapunov functions for general nonlinear systems is a challenging task. To address this challenge, several methods have been proposed that represent Lyapunov functions using neural networks. However, such approaches either focus on continuous-time systems, or highly restricted classes of nonlinear dynamics. We propose the first approach for learning neural Lyapunov control in a broad class of discrete-time systems. Three key ingredients enable us to effectively learn provably stable control policies. The first is a novel mixed-integer linear programming approach for verifying the discrete-time Lyapunov stability conditions, leveraging the particular structure of these conditions. The second is a novel approach for computing verified sublevel sets. The third is a heuristic gradient-based method for quickly finding counterexamples to significantly speed up Lyapunov function learning. Our experiments on four standard benchmarks demonstrate that our approach significantly outperforms state-of-the-art baselines. For example, on the path tracking benchmark, we outperform recent neural Lyapunov control baselines by an order of magnitude in both running time and the size of the region of attraction, and on two of the four benchmarks (cartpole and PVTOL), ours is the first automated approach to return a provably stable controller. Our code is available at: https://github.com/jlwu002/nlc_discrete.