Loss Decoupling for Task-Agnostic Continual Learning
{kind=link}
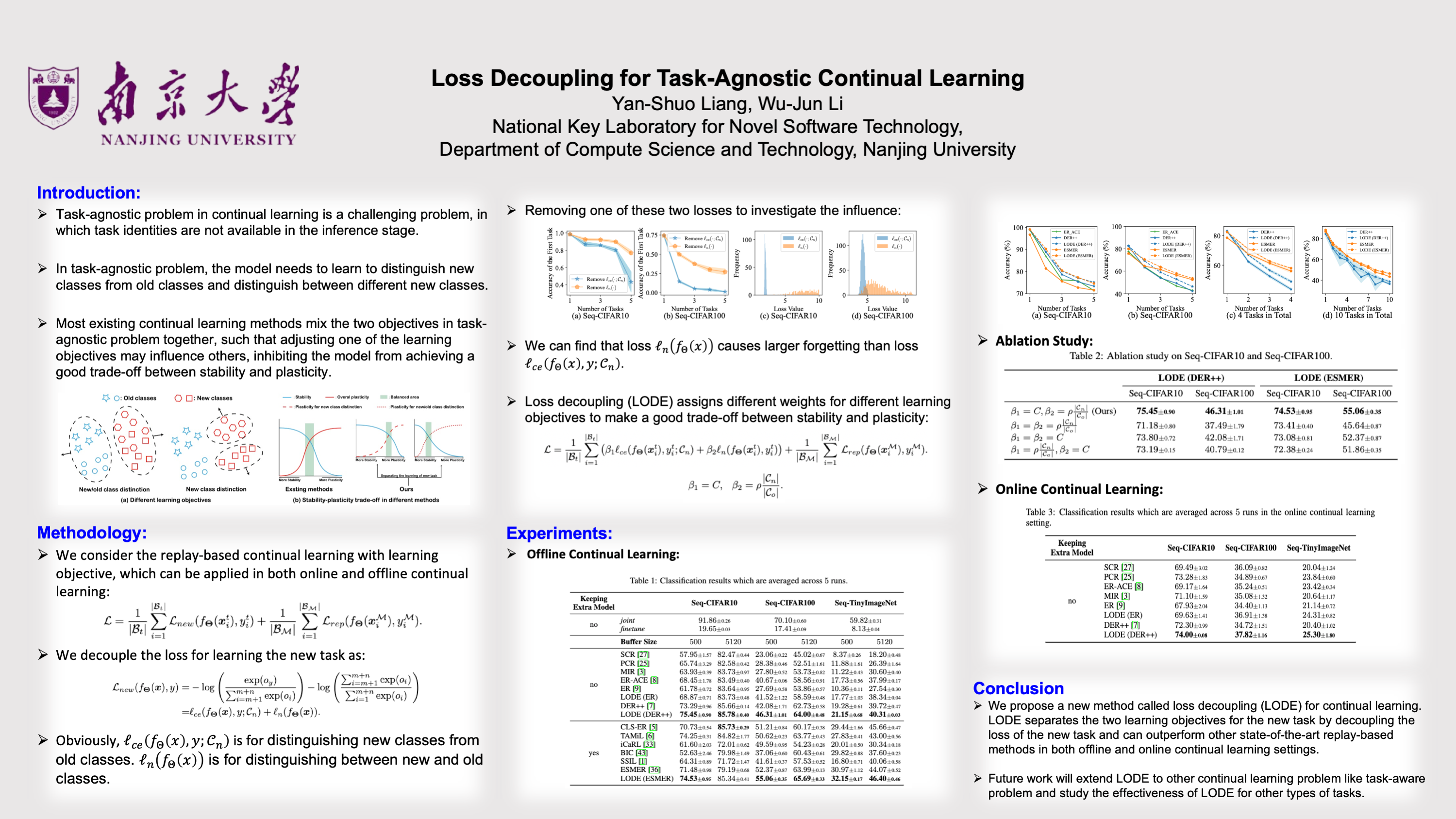
Abstract
Continual learning requires the model to learn multiple tasks in a sequential order. To perform continual learning, the model must possess the abilities to maintain performance on old tasks (stability) and adapt itself to learn new tasks (plasticity). Task-agnostic problem in continual learning is a challenging problem, in which task identities are not available in the inference stage and hence the model must learn to distinguish all the classes in all the tasks. In task-agnostic problem, the model needs to learn two new objectives for learning a new task, including distinguishing new classes from old classes and distinguishing between different new classes. For task-agnostic problem, replay-based methods are commonly used. These methods update the model with both saved old samples and new samples for continual learning. Most existing replay-based methods mix the two objectives in task-agnostic problem together, inhibiting the models from achieving a good trade-off between stability and plasticity. In this paper, we propose a simple yet effective method, called loss decoupling (LODE), for task-agnostic continual learning. LODE separates the two objectives for the new task by decoupling the loss of the new task. As a result, LODE can assign different weights for different objectives, which provides a way to obtain a better trade-off between stability and plasticity than those methods with coupled loss. Experiments show that LODE can outperform existing state-of-the-art replay-based methods on multiple continual learning datasets.