Tame a Wild Camera: In-the-Wild Monocular Camera Calibration
{kind=link}
Abstract
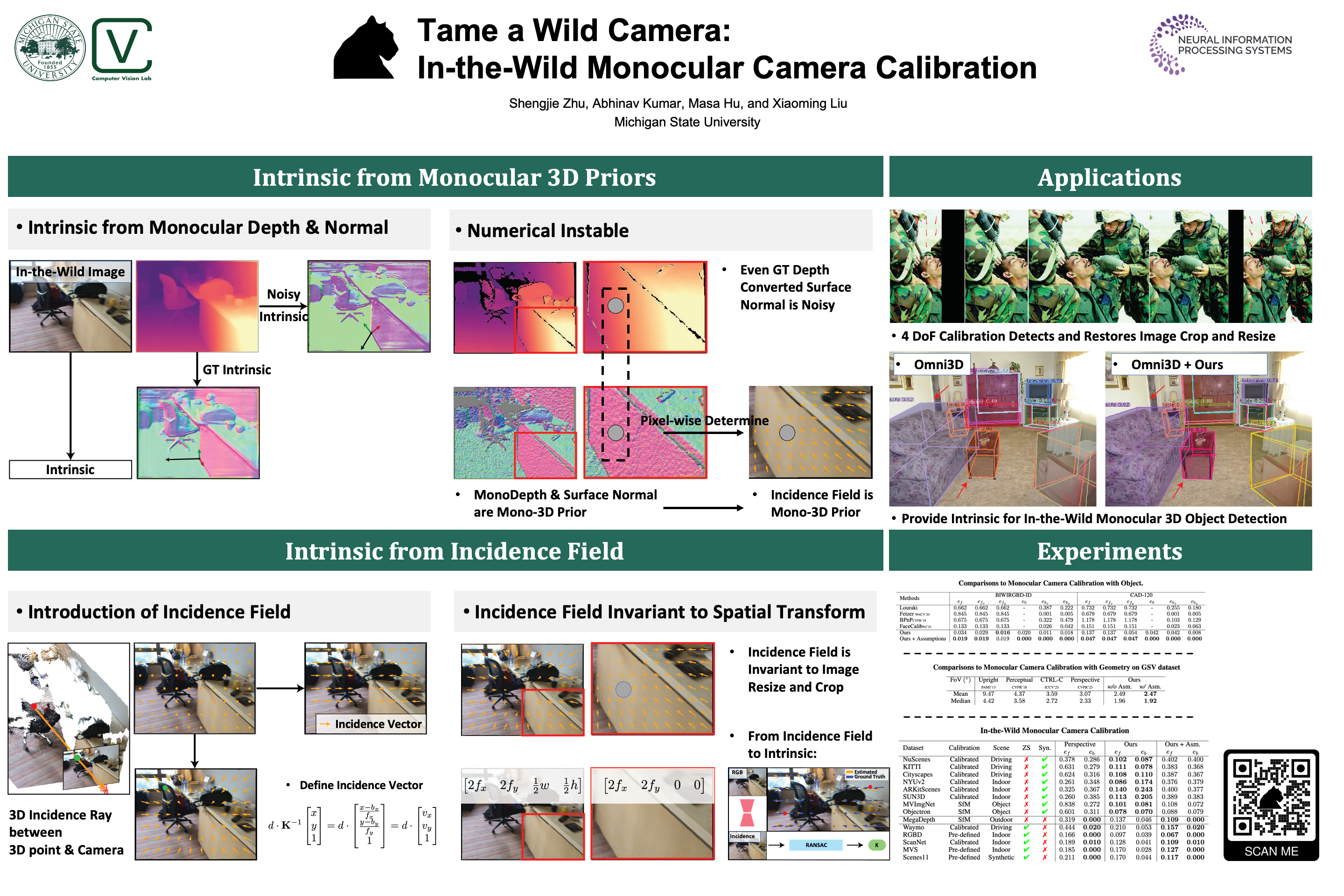
3D sensing for monocular in-the-wild images, e.g., depth estimation and 3D object detection, has become increasingly important.However, the unknown intrinsic parameter hinders their development and deployment.Previous methods for the monocular camera calibration rely on specific 3D objects or strong geometry prior, such as using a checkerboard or imposing a Manhattan World assumption.This work instead calibrates intrinsic via exploiting the monocular 3D prior.Given an undistorted image as input, our method calibrates the complete 4 Degree-of-Freedom (DoF) intrinsic parameters.First, we show intrinsic is determined by the two well-studied monocular priors: monocular depthmap and surface normal map.However, this solution necessitates a low-bias and low-variance depth estimation.Alternatively, we introduce the incidence field, defined as the incidence rays between points in 3D space and pixels in the 2D imaging plane.We show that: 1) The incidence field is a pixel-wise parametrization of the intrinsic invariant to image cropping and resizing.2) The incidence field is a learnable monocular 3D prior, determined pixel-wisely by up-to-sacle monocular depthmap and surface normal.With the estimated incidence field, a robust RANSAC algorithm recovers intrinsic.We show the effectiveness of our method through superior performance on synthetic and zero-shot testing datasets.Beyond calibration, we demonstrate downstream applications in image manipulation detection & restoration, uncalibrated two-view pose estimation, and 3D sensing.