A Simple Solution for Offline Imitation from Observations and Examples with Possibly Incomplete Trajectories
{kind=link}
Abstract
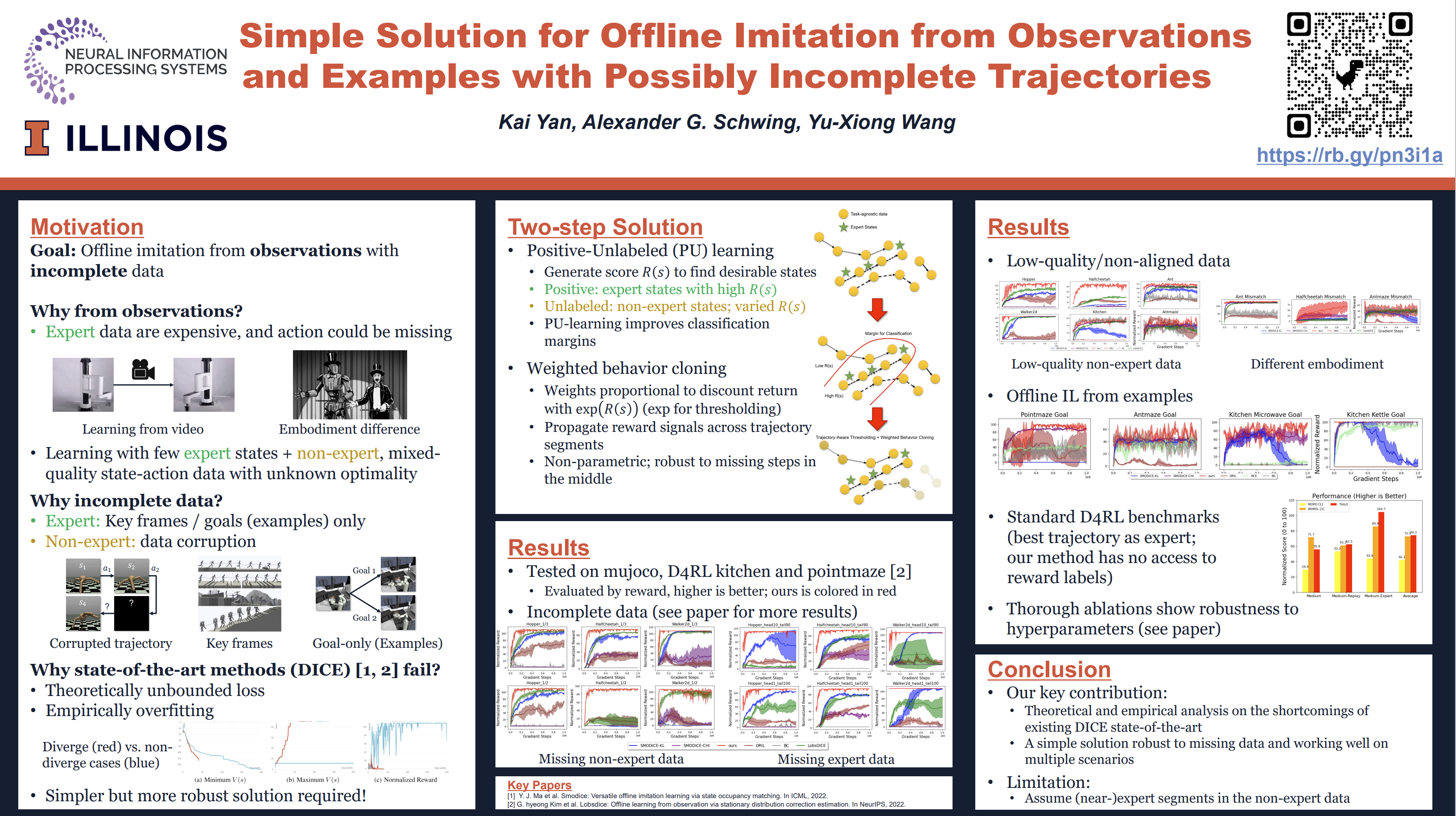
Offline imitation from observations aims to solve MDPs where only task-specific expert states and task-agnostic non-expert state-action pairs are available. Offline imitation is useful in real-world scenarios where arbitrary interactions are costly and expert actions are unavailable. The state-of-the-art ‘DIstribution Correction Estimation’ (DICE) methods minimize divergence of state occupancy between expert and learner policies and retrieve a policy with weighted behavior cloning; however, their results are unstable when learning from incomplete trajectories, due to a non-robust optimization in the dual domain. To address the issue, in this paper, we propose Trajectory-Aware Imitation Learning from Observations (TAILO). TAILO uses a discounted sum along the future trajectory as the weight for weighted behavior cloning. The terms for the sum are scaled by the output of a discriminator, which aims to identify expert states. Despite simplicity, TAILO works well if there exist trajectories or segments of expert behavior in the task-agnostic data, a common assumption in prior work. In experiments across multiple testbeds, we find TAILO to be more robust and effective, particularly with incomplete trajectories.