DDF-HO: Hand-Held Object Reconstruction via Conditional Directed Distance Field
{kind=link}
Abstract
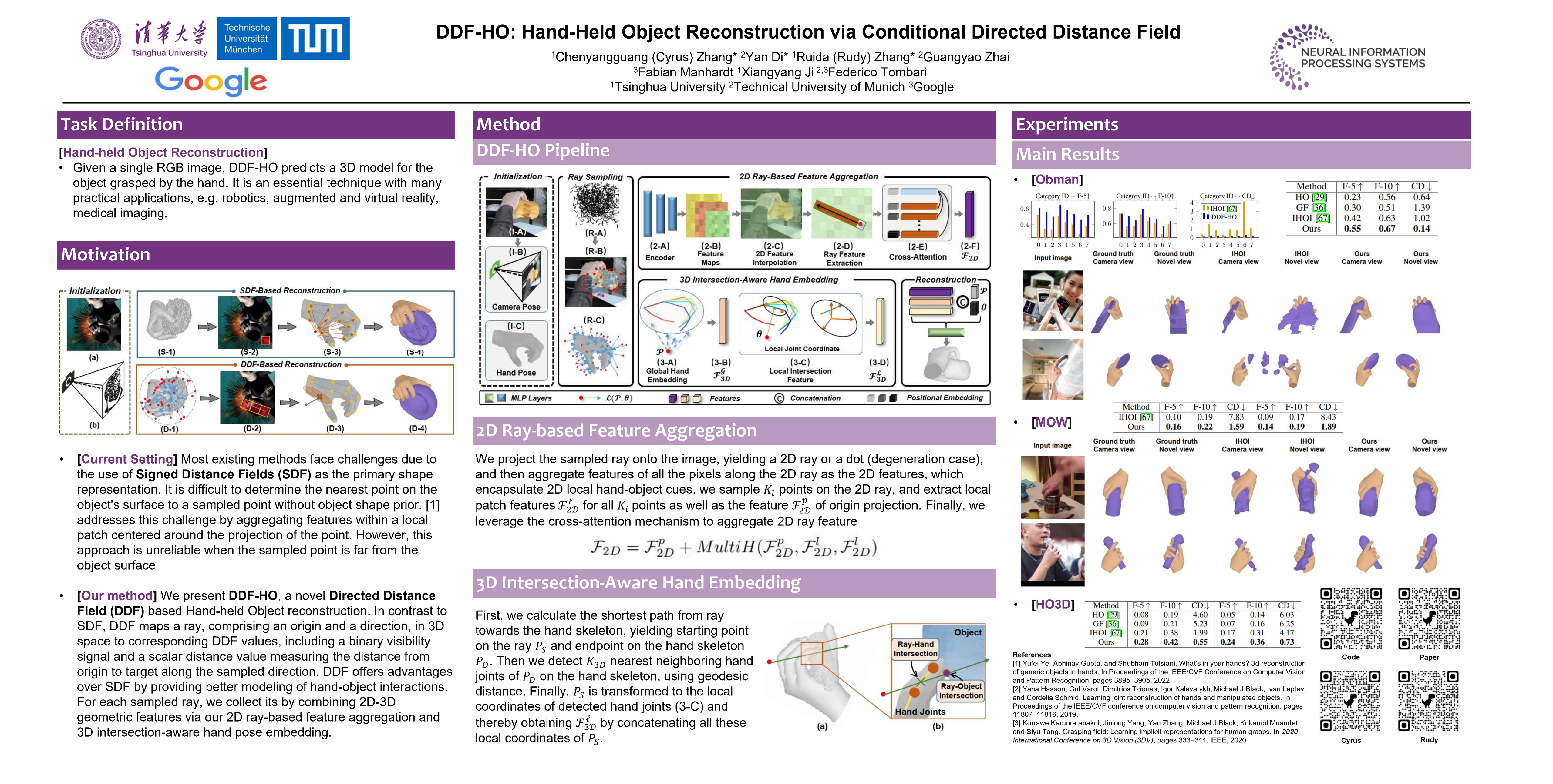
Reconstructing hand-held objects from a single RGB image is an important and challenging problem. Existing works utilizing Signed Distance Fields (SDF) reveal limitations in comprehensively capturing the complex hand-object interactions, since SDF is only reliable within the proximity of the target, and hence, infeasible to simultaneously encode local hand and object cues. To address this issue, we propose DDF-HO, a novel approach leveraging Directed Distance Field (DDF) as the shape representation. Unlike SDF, DDF maps a ray in 3D space, consisting of an origin and a direction, to corresponding DDF values, including a binary visibility signal determining whether the ray intersects the objects and a distance value measuring the distance from origin to target in the given direction. We randomly sample multiple rays and collect local to global geometric features for them by introducing a novel 2D ray-based feature aggregation scheme and a 3D intersection-aware hand pose embedding, combining 2D-3D features to model hand-object interactions. Extensive experiments on synthetic and real-world datasets demonstrate that DDF-HO consistently outperforms all baseline methods by a large margin, especially under Chamfer Distance, with about 80% leap forward. Codes are available at https://github.com/ZhangCYG/DDFHO.