Adjustable Robust Reinforcement Learning for Online 3D Bin Packing
{kind=link}
Abstract
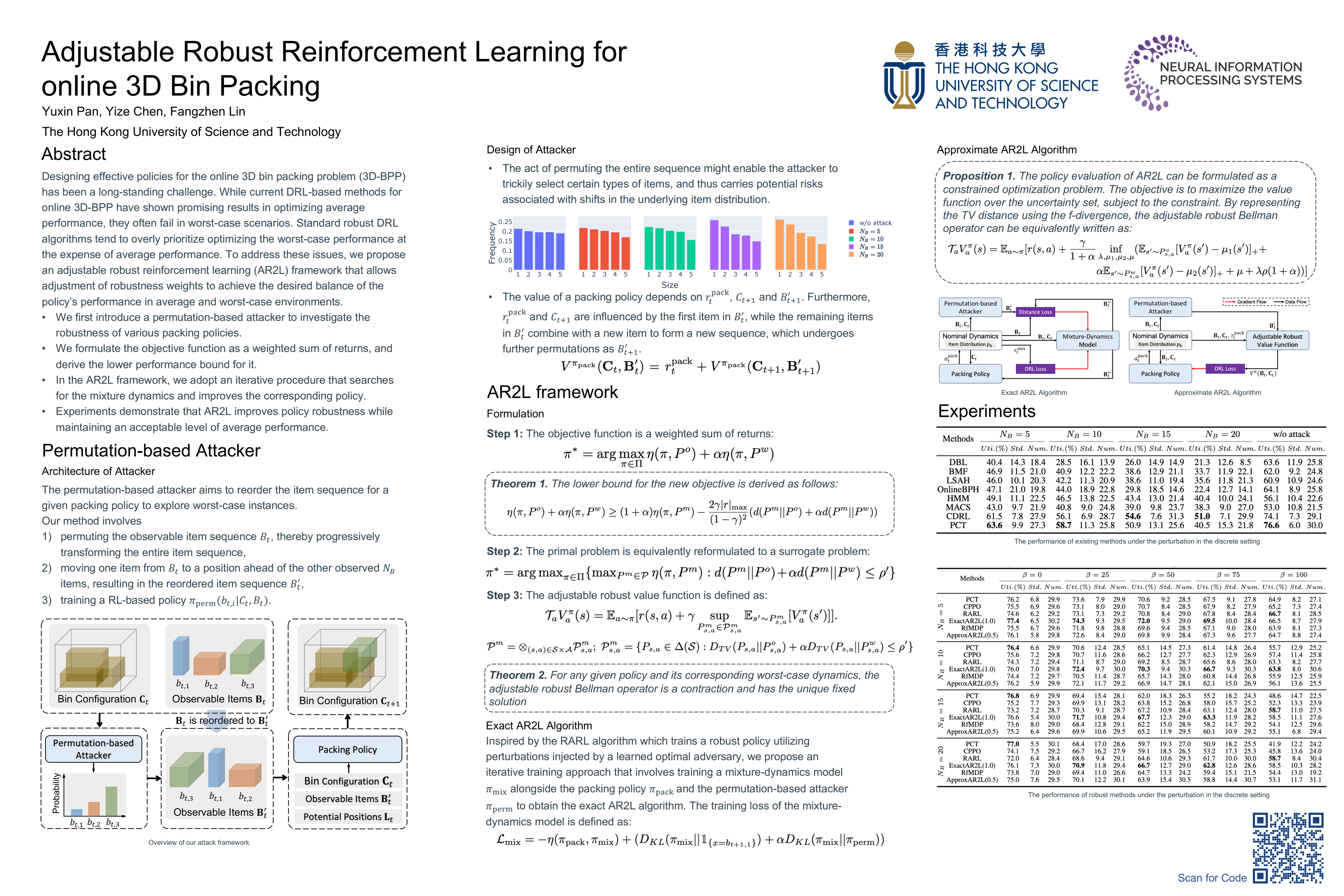
Designing effective policies for the online 3D bin packing problem (3D-BPP) has been a long-standing challenge, primarily due to the unpredictable nature of incoming box sequences and stringent physical constraints. While current deep reinforcement learning (DRL) methods for online 3D-BPP have shown promising results in optimizing average performance over an underlying box sequence distribution, they often fail in real-world settings where some worst-case scenarios can materialize. Standard robust DRL algorithms tend to overly prioritize optimizing the worst-case performance at the expense of performance under normal problem instance distribution. To address these issues, we first introduce a permutation-based attacker to investigate the practical robustness of both DRL-based and heuristic methods proposed for solving online 3D-BPP. Then, we propose an adjustable robust reinforcement learning (AR2L) framework that allows efficient adjustment of robustness weights to achieve the desired balance of the policy's performance in average and worst-case environments. Specifically, we formulate the objective function as a weighted sum of expected and worst-case returns, and derive the lower performance bound by relating to the return under a mixture dynamics. To realize this lower bound, we adopt an iterative procedure that searches for the associated mixture dynamics and improves the corresponding policy. We integrate this procedure into two popular robust adversarial algorithms to develop the exact and approximate AR2L algorithms. Experiments demonstrate that AR2L is versatile in the sense that it improves policy robustness while maintaining an acceptable level of performance for the nominal case.