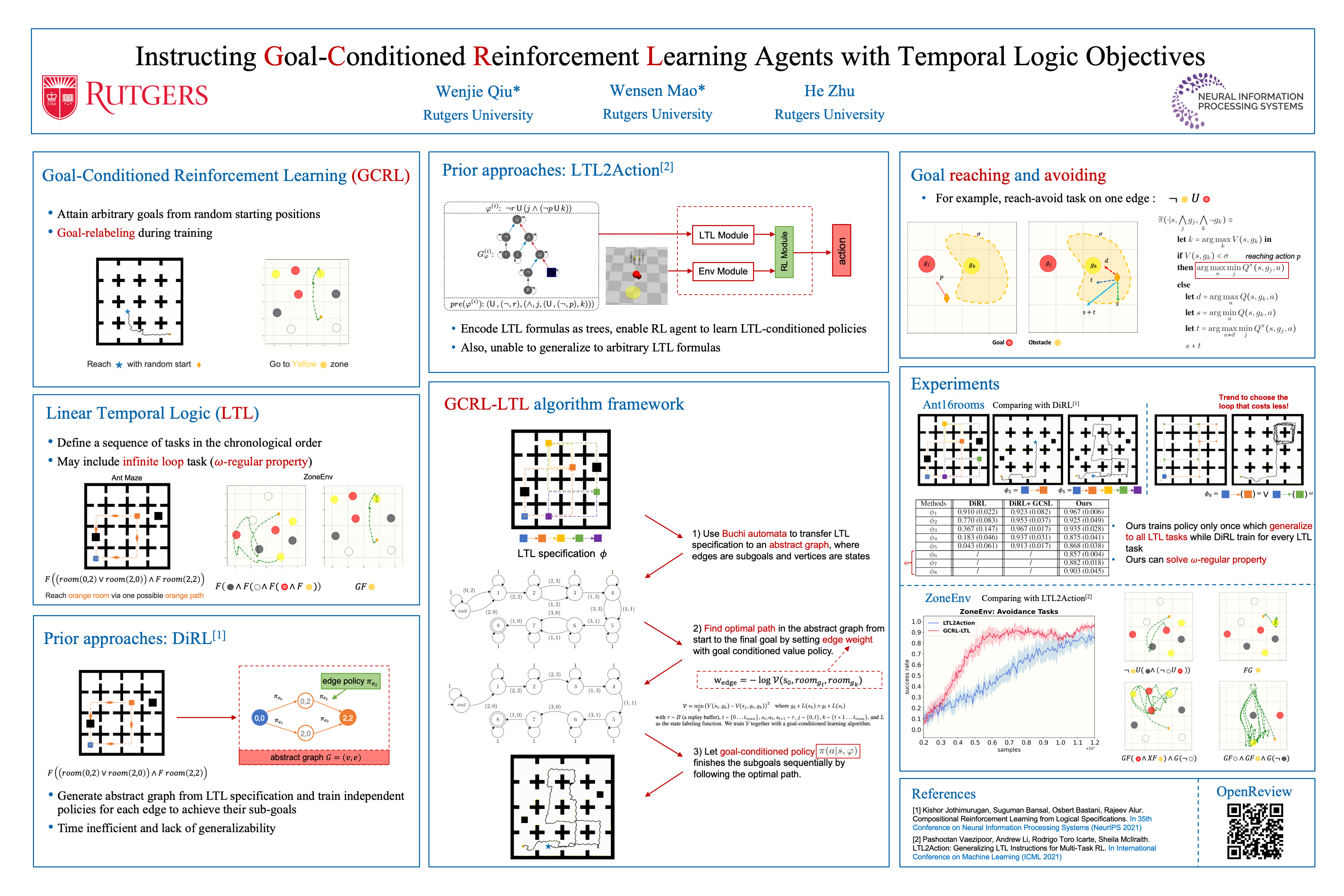
Instructing Goal-Conditioned Reinforcement Learning Agents with Temporal Logic Objectives
Wenjie Qiu ⋅ Wensen Mao ⋅ He Zhu
2023 Poster
{kind=link}
Abstract
Goal-conditioned reinforcement learning (RL) is a powerful approach for learning general-purpose skills by reaching diverse goals. However, it has limitations when it comes to task-conditioned policies, where goals are specified by temporally extended instructions written in the Linear Temporal Logic (LTL) formal language. Existing approaches for finding LTL-satisfying policies rely on sampling a large set of LTL instructions during training to adapt to unseen tasks at inference time. However, these approaches do not guarantee generalization to out-of-distribution LTL objectives, which may have increased complexity. In this paper, we propose a novel approach to address this challenge. We show that simple goal-conditioned RL agents can be instructed to follow arbitrary LTL specifications without additional training over the LTL task space. Unlike existing approaches that focus on LTL specifications expressible as regular expressions, our technique is unrestricted and generalizes to $\omega$-regular expressions. Experiment results demonstrate the effectiveness of our approach in adapting goal-conditioned RL agents to satisfy complex temporal logic task specifications zero-shot.
Video
Chat is not available.
Successful Page Load