Efficient Potential-based Exploration in Reinforcement Learning using Inverse Dynamic Bisimulation Metric
{kind=link}
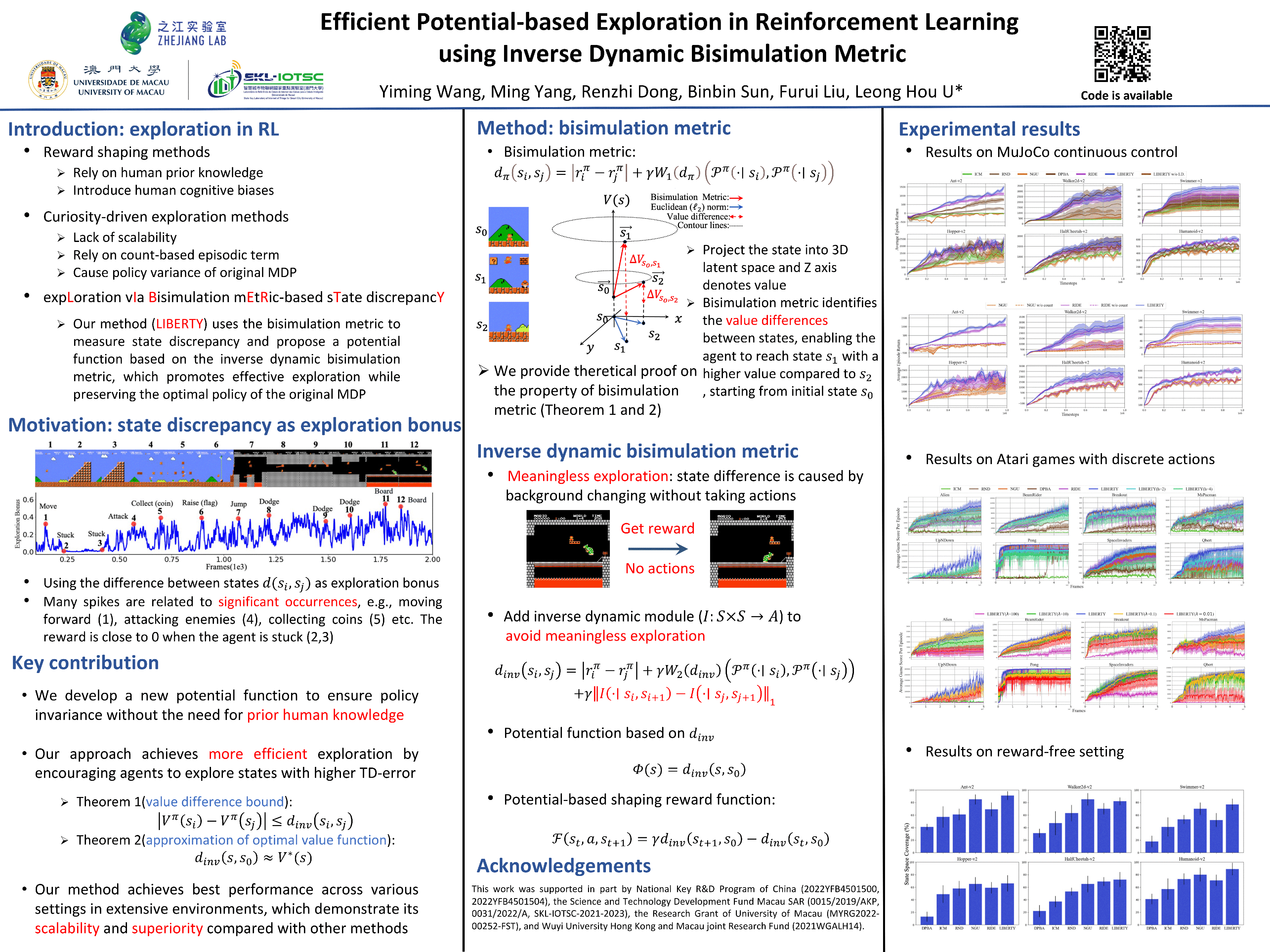
Abstract
Reward shaping is an effective technique for integrating domain knowledge into reinforcement learning (RL). However, traditional approaches like potential-based reward shaping totally rely on manually designing shaping reward functions, which significantly restricts exploration efficiency and introduces human cognitive biases.While a number of RL methods have been proposed to boost exploration by designing an intrinsic reward signal as exploration bonus. Nevertheless, these methods heavily rely on the count-based episodic term in their exploration bonus which falls short in scalability. To address these limitations, we propose a general end-to-end potential-based exploration bonus for deep RL via potentials of state discrepancy, which motivates the agent to discover novel states and provides them with denser rewards without manual intervention. Specifically, we measure the novelty of adjacent states by calculating their distance using the bisimulation metric-based potential function, which enhances agent's exploration and ensures policy invariance. In addition, we offer a theoretical guarantee on our inverse dynamic bisimulation metric, bounding the value difference and ensuring that the agent explores states with higher TD error, thus significantly improving training efficiency. The proposed approach is named \textbf{LIBERTY} (exp\textbf{L}oration v\textbf{I}a \textbf{B}isimulation m\textbf{E}t\textbf{R}ic-based s\textbf{T}ate discrepanc\textbf{Y}) which is comprehensively evaluated on the MuJoCo and the Arcade Learning Environments. Extensive experiments have verified the superiority and scalability of our algorithm compared with other competitive methods.