Stanford-ORB: A Real-World 3D Object Inverse Rendering Benchmark
{kind=link}
Abstract
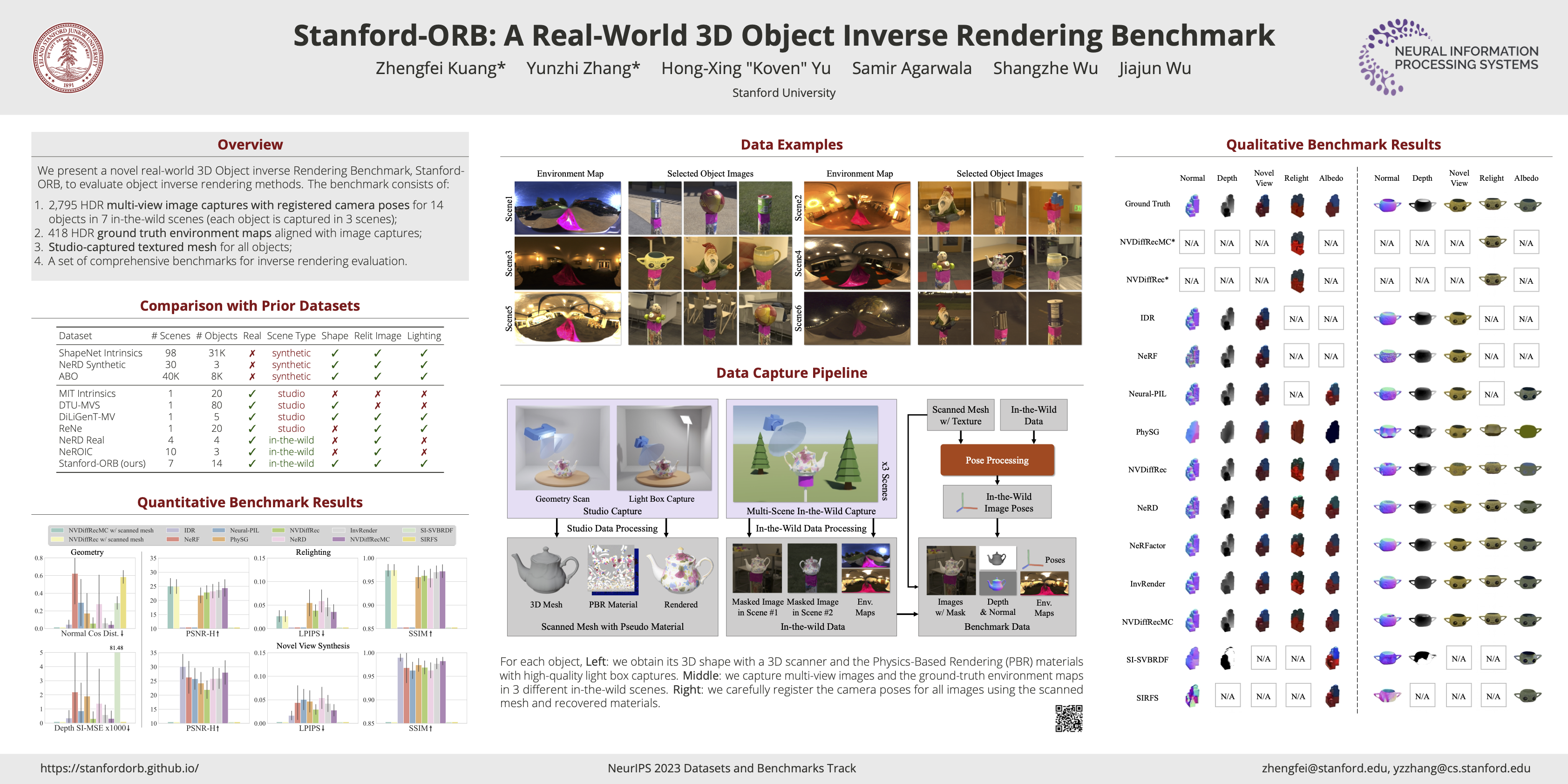
We introduce Stanford-ORB, a new real-world 3D Object inverse Rendering Benchmark. Recent advances in inverse rendering have enabled a wide range of real-world applications in 3D content generation, moving rapidly from research and commercial use cases to consumer devices. While the results continue to improve, there is no real-world benchmark that can quantitatively assess and compare the performance of various inverse rendering methods. Existing real-world datasets typically only consist of the shape and multi-view images of objects, which are not sufficient for evaluating the quality of material recovery and object relighting. Methods capable of recovering material and lighting often resort to synthetic data for quantitative evaluation, which on the other hand does not guarantee generalization to complex real-world environments. We introduce a new dataset of real-world objects captured under a variety of natural scenes with ground-truth 3D scans, multi-view images, and environment lighting. Using this dataset, we establish the first comprehensive real-world evaluation benchmark for object inverse rendering tasks from in-the-wild scenes, and compare the performance of various existing methods. All data, code, and models can be accessed at https://stanfordorb.github.io/