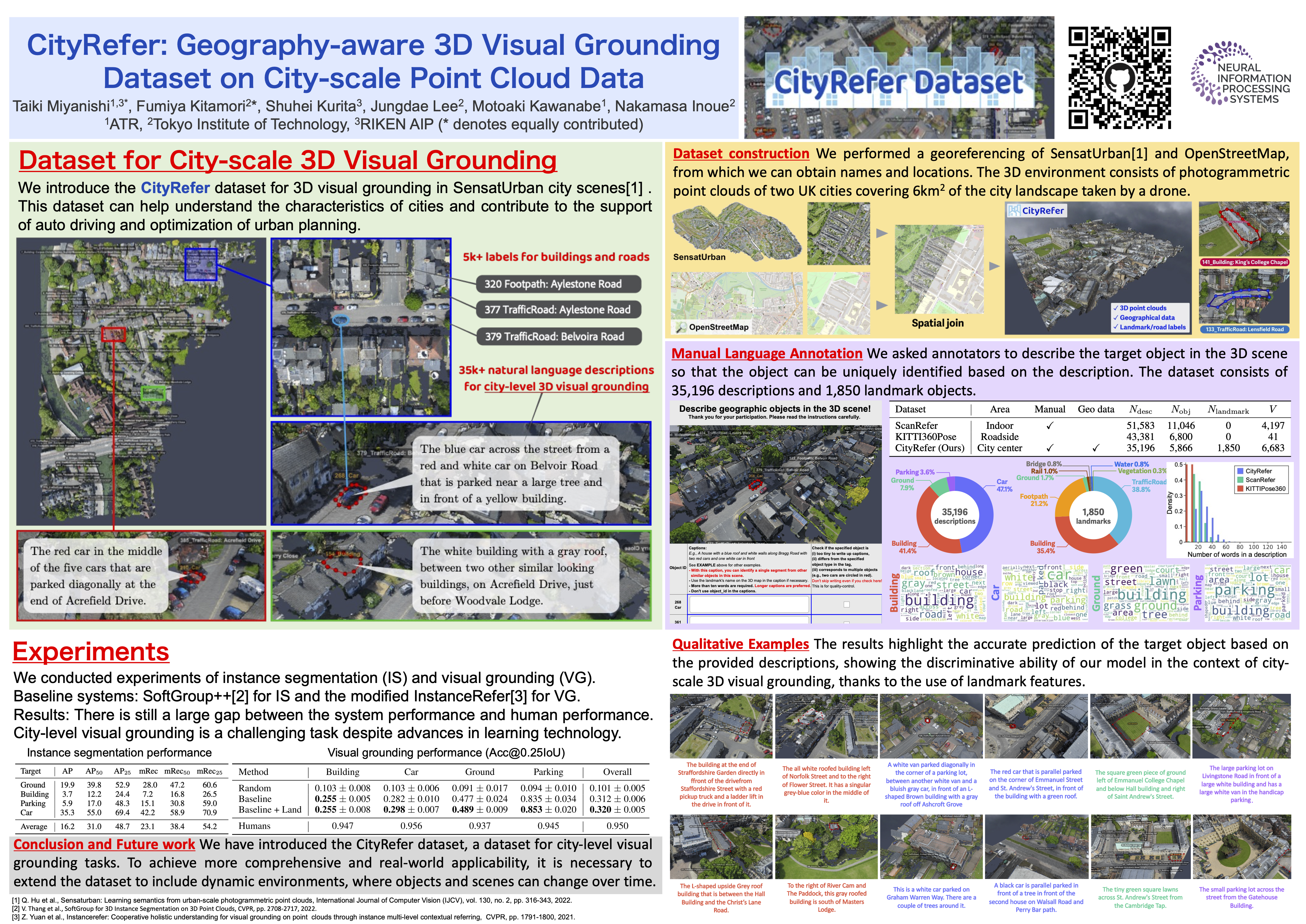
CityRefer: Geography-aware 3D Visual Grounding Dataset on City-scale Point Cloud Data
{kind=link}
Abstract
City-scale 3D point cloud is a promising way to express detailed and complicated outdoor structures. It encompasses both the appearance and geometry features of segmented city components, including cars, streets, and buildings that can be utilized for attractive applications such as user-interactive navigation of autonomous vehicles and drones. However, compared to the extensive text annotations available for images and indoor scenes, the scarcity of text annotations for outdoor scenes poses a significant challenge for achieving these applications. To tackle this problem, we introduce the CityRefer dataset for city-level visual grounding. The dataset consists of 35k natural language descriptions of 3D objects appearing in SensatUrban city scenes and 5k landmarks labels synchronizing with OpenStreetMap. To ensure the quality and accuracy of the dataset, all descriptions and labels in the CityRefer dataset are manually verified. We also have developed a baseline system that can learn encoded language descriptions, 3D object instances, and geographical information about the city's landmarks to perform visual grounding on the CityRefer dataset. To the best of our knowledge, the CityRefer dataset is the largest city-level visual grounding dataset for localizing specific 3D objects.