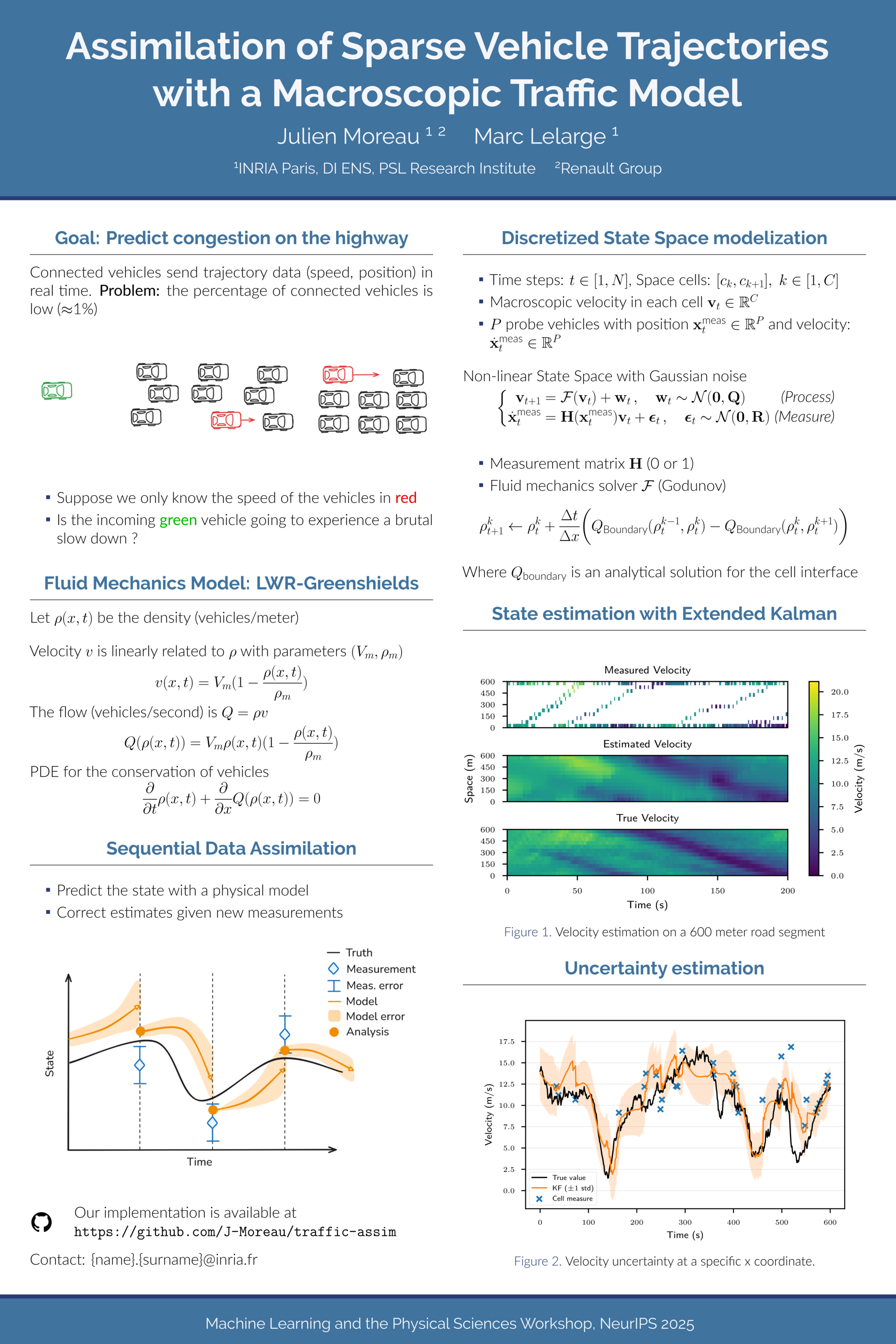
Assimilation of Sparse Vehicle Trajectories with a Macroscopic Traffic Model
Julien Moreau ⋅ Marc Lelarge
{kind=link}
Abstract
Accurate macroscopic traffic prediction could lead to smarter vehicles and safer roads. It is however dependent on reliable and frequent measurements. Recent research in scientific machine learning has shown progress on reconstruction tasks using probe vehicles, hinting at potential gains for a sequential prediction model. In this work, we adopt the classical data assimilation framework and gather insight on how to design effective predictors. Our results highlight the effectiveness of macroscopic solvers given sparse data while confirming the flexibility of Kalman filtering. However, we report the difficulty of calibrating the solution given the low amount of measures and their high variance.
Chat is not available.
Successful Page Load