PI-NAV: Physics-Informed Universal Differential Equations for Enhanced Nanorobot Navigation through Complex Bio-environments
{kind=link}
Abstract
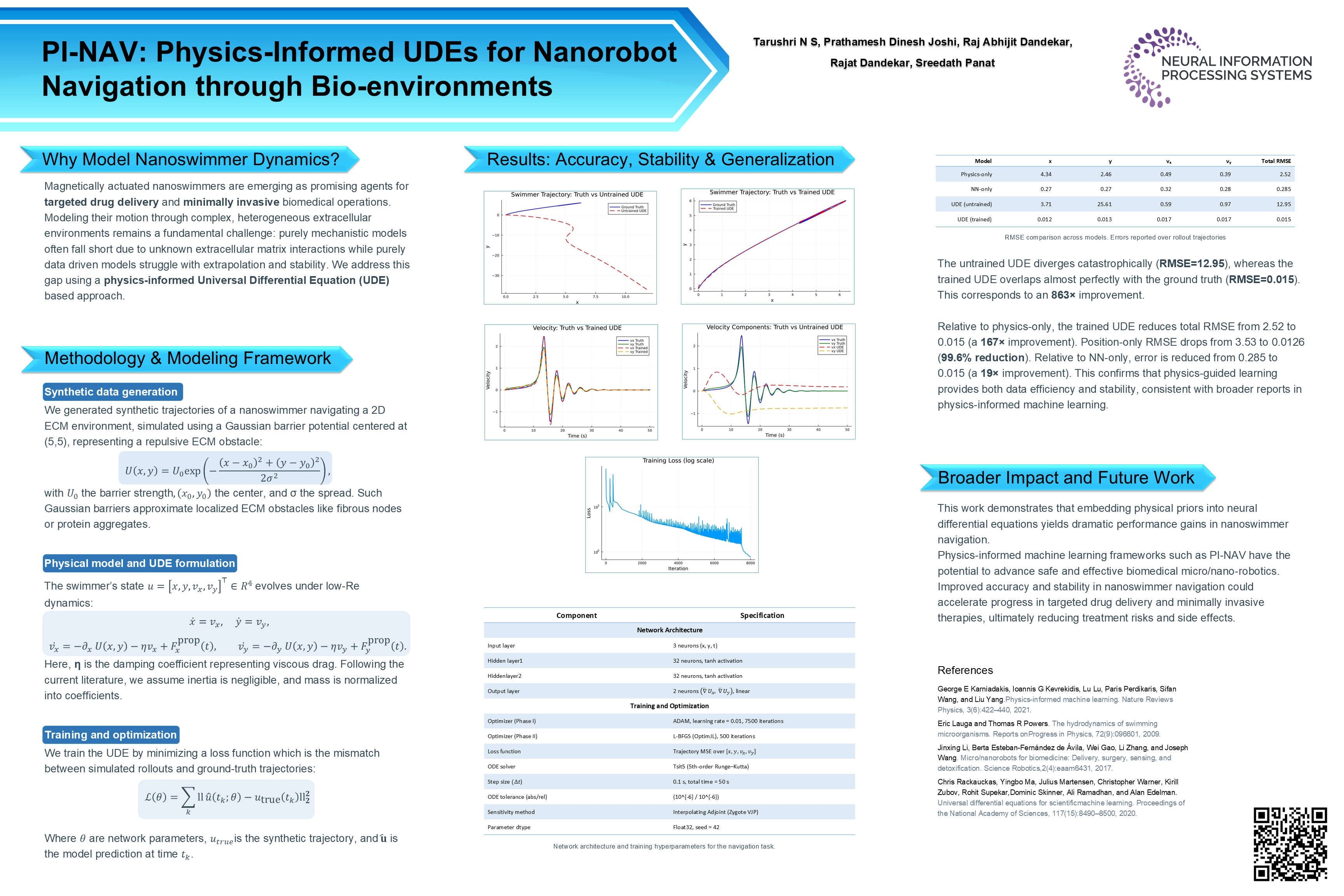
Magnetically actuated nanoswimmers are emerging as promising agents for targeted drug delivery andminimally invasive biomedical operations. Modeling their motion through complex, heterogeneousextracellular environments remains a fundamental challenge: purely mechanistic models often fallshort due to unknown extracellular matrix interactions while purely data driven models struggle withextrapolation and stability. We address this gap using a physics-informed Universal DifferentialEquation (UDE) based approach. Here, we have embedded a mechanistic backbone based on magnetictorque and low-Reynolds propulsion into a learnable neural residual, training the system to accuratelycapture unknown environmental forces from observed trajectories. On a synthetic navigation task witha Gaussian barrier, the UDE performs brilliantly achieving a total root-mean-squared error (RMSE) of 0.015, compared to 2.52for physics-only and 0.285 for a purely neural ODE. Untrained UDEs diverged with RMSE 12.95. These results highlight the strong accuracy, stability, and data-efficiency of physics-guided learning.More broadly, this work positions physics-informed UDEs as a compact and interpretable framework for modeling complex biophysical systems, advancing the role of scientific machine learning in biomedical micro/nano-robotics.