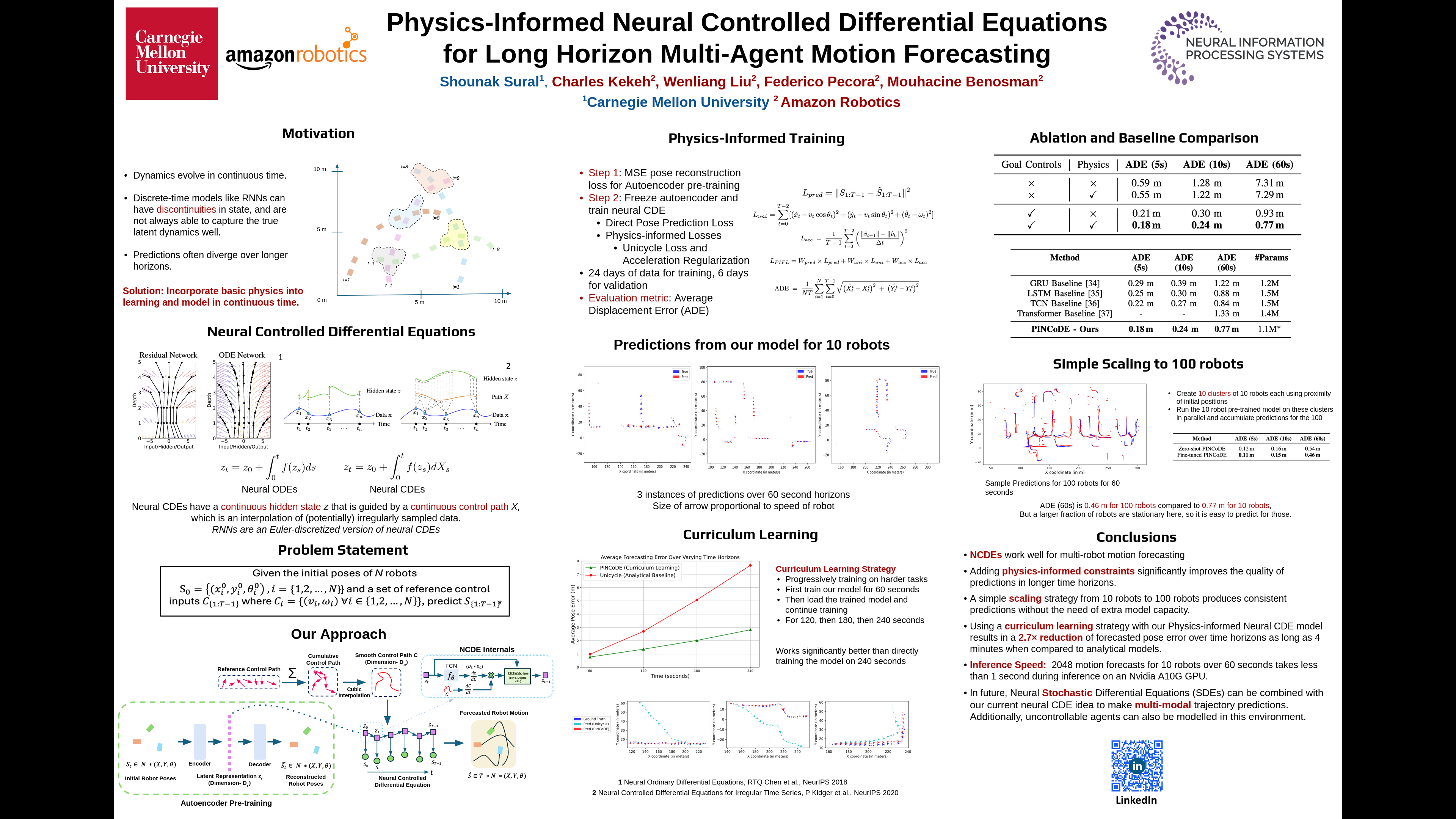
Physics-Informed Neural Controlled Differential Equations for Long Horizon Multi-Agent Motion Forecasting
{kind=link}
Abstract
Long-horizon motion forecasting for multiple autonomous robots is challenging due to non-linear agent interactions, compounding prediction errors, and continuous-time evolution of dynamics. Learnt dynamics of such a system can be useful in various applications such as travel time prediction, prediction-guided planning and surrogate simulation. In this work, we aim to develop a fast trajectory forecasting model conditioned on multi-agent goals. Motivated by the recent success of physics-guided deep learning for partially known dynamical systems, we develop a model based on neural Controlled Differential Equations (CDEs) for long-horizon motion forecasting. Unlike discrete-time methods such as RNNs and transformers, neural CDEs operate in continuous time, allowing us to combine physics-informed constraints and biases to jointly model multi-robot dynamics. Our approach learns differential equation parameters that can be used to predict the trajectories of a multi-agent system starting from an initial condition, while enforcing physics constraints to predict robot motion over extended periods of time. Our experiments show that our method is capable of learning non-trivial dynamics for such systems.