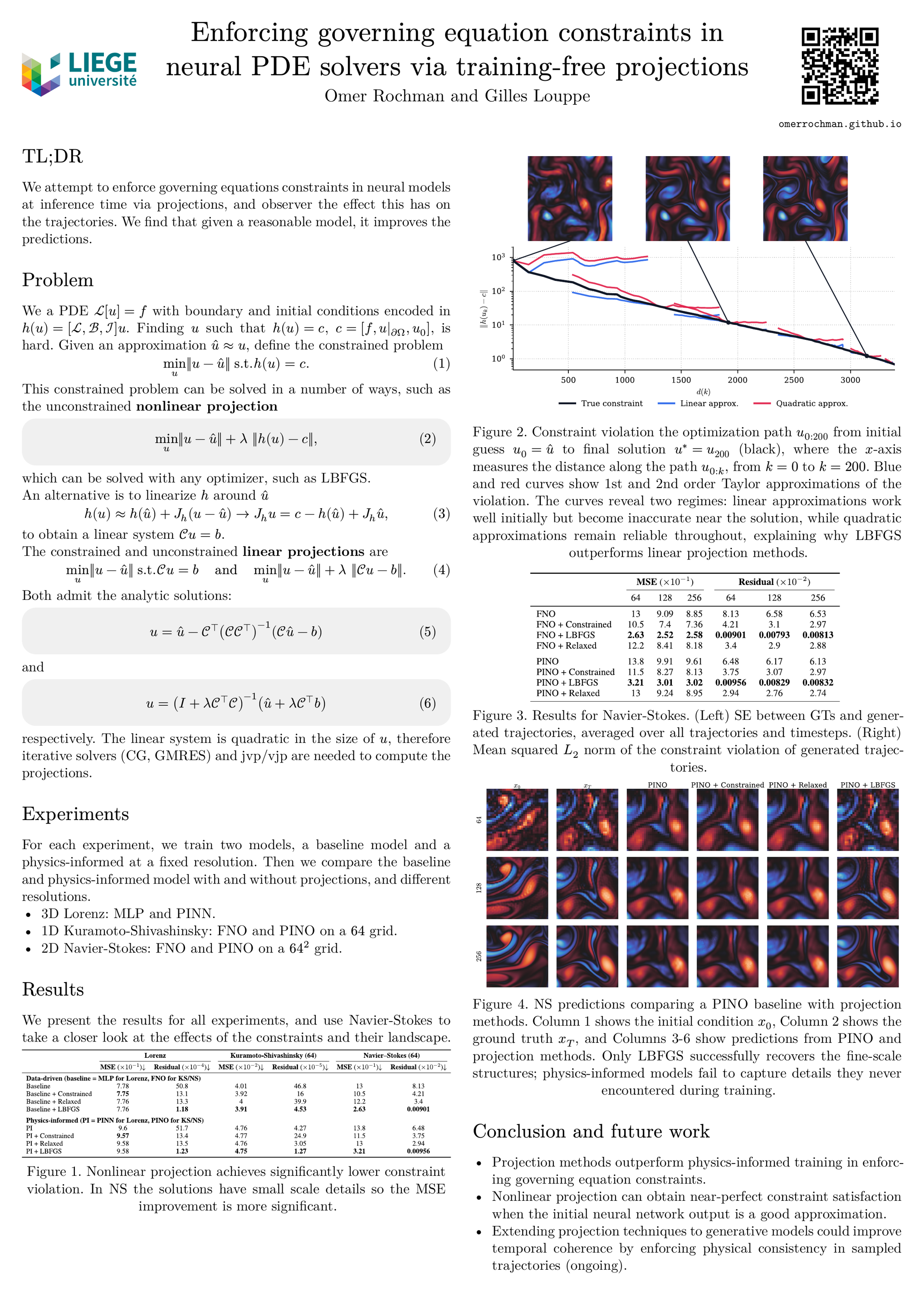
Enforcing governing equation constraints in neural PDE solvers via training-free projections
Omer Rochman Sharabi ⋅ Gilles Louppe
{kind=link}
Abstract
Neural PDE solvers used for scientific simulation often violate governing equation constraints. While linear constraints can be projected cheaply, many constraints are nonlinear, complicating projection onto the feasible set. Dynamical PDEs are especially difficult because constraints induce long-range dependencies in time. In this work, we evaluate two training-free, post hoc projections of approximate solutions: a nonlinear optimization-based projection, and a local linearization-based projection using Jacobian-vector and vector-Jacobian products. We analyze constraints across representative PDEs and find that both projections substantially reduce violations and improve accuracy over physics-informed baselines.
Chat is not available.
Successful Page Load