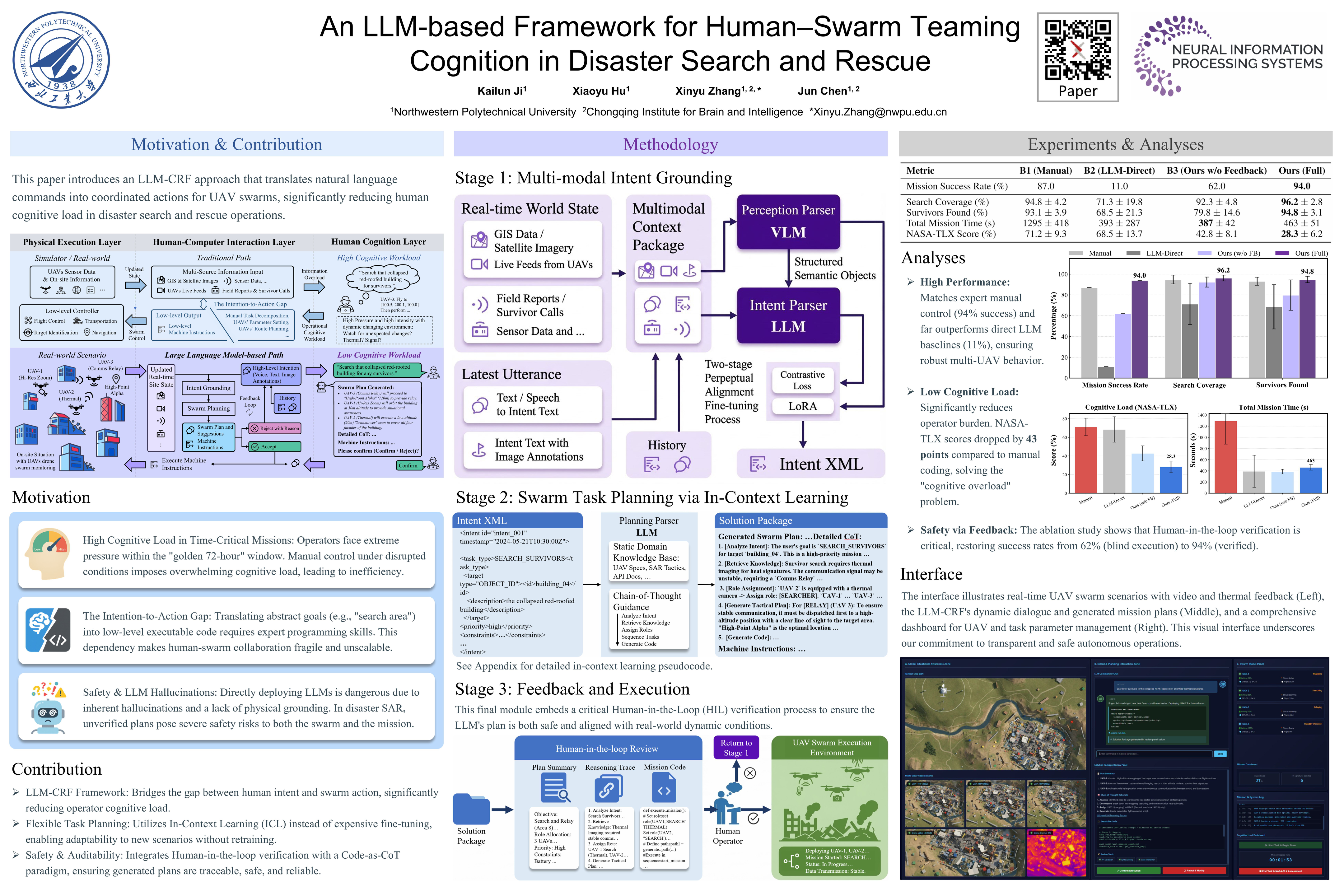
An LLM-based Framework for Human-Swarm Teaming Cognition in Disaster Search and Rescue
Kailun Ji ⋅ Xinyu Zhang ⋅ Xiaoyu Hu ⋅ Jun Chen
{kind=link}
Abstract
Large-scale disaster Search And Rescue (SAR) operations are persistently challenged by complex terrain and disrupted communications. While Unmanned Aerial Vehicle (UAV) swarms offer a promising solution for tasks like wide-area search and supply delivery, yet their effective coordination places a significant cognitive burden on human operators. The core human-machine collaboration bottleneck lies in the ''intention-to-action gap'', which is an error-prone process of translating a high-level rescue objective into a low-level swarm command under high intensity and pressure. To bridge this gap, this study proposes a novel LLM-CRF system that leverages Large Language Models (LLMs) to model and augment human-swarm teaming cognition. The proposed framework initially captures the operator's intention through natural and multi-modal interactions with the device via voice or graphical annotations. It then employs the LLM as a cognitive engine to perform intention comprehension, hierarchical task decomposition, and mission planning for the UAV swarm. This closed-loop framework enables the swarm to act as a proactive partner, providing active feedback in real-time while reducing the need for manual monitoring and control, which considerably advances the efficacy of the SAR task. We evaluate the proposed framework in a simulated SAR scenario. Experimental results demonstrate that, compared to traditional order and command-based interfaces, the proposed LLM-driven approach reduced task completion time by approximately $64.2$% and improved task success rate by $7$%. It also leads to a considerable reduction in subjective cognitive workload, with NASA-TLX scores dropping by $42.9$%. This work establishes the potential of LLMs to create more intuitive and effective human-swarm collaborations in high-stakes scenarios.
Chat is not available.
Successful Page Load