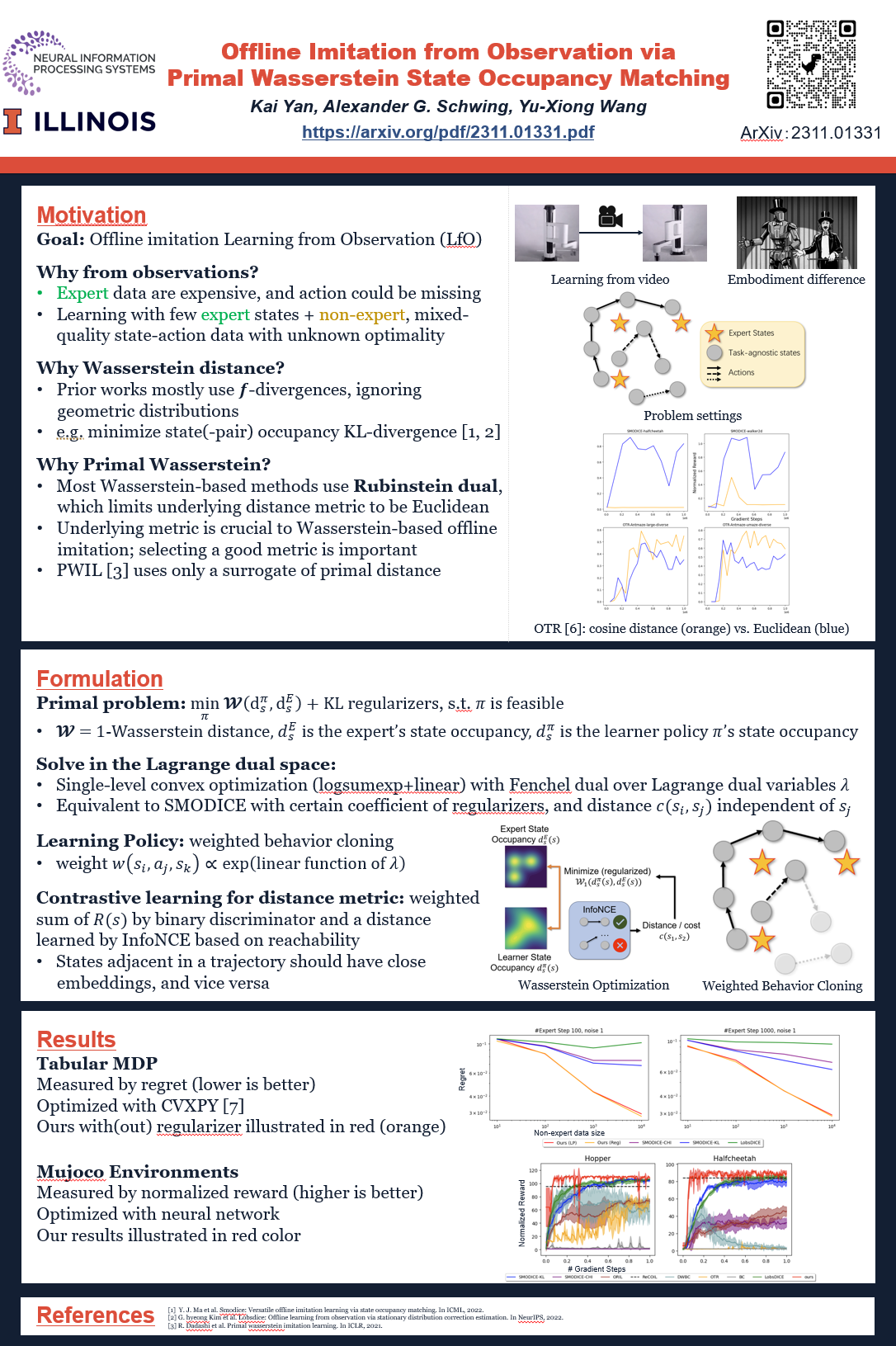
Offline Imitation from Observation via Primal Wasserstein State Occupancy Matching
Kai Yan ⋅ Alex Schwing ⋅ Yu-Xiong Wang
{kind=link}
Abstract
In real-world scenarios, arbitrary interactions with the environment can often be costly, and actions of expert demonstrations are not always available. To reduce the need for both, Offline Learning from Observations (LfO) is extensively studied, where the agent learns to solve a task with only expert states and task-agnostic non-expert state-action pairs. The state-of-the-art DIstribution Correction Estimation (DICE) methods minimize the state occupancy divergence between the learner and expert policies. However, they are limited to either $f$-divergences (KL and $\chi^2$) or Wasserstein distance with Rubinstein duality, the latter of which constrains the underlying distance metric crucial to the performance of Wasserstein-based solutions. To address this problem, we propose Primal Wasserstein DICE (PW-DICE), which minimizes the primal Wasserstein distance between the expert and learner state occupancies with a pessimistic regularizer and leverages a contrastively learned distance as the underlying metric for the Wasserstein distance. Theoretically, we prove that our framework is a generalization of the state-of-the-art, SMODICE, and unifies $f$-divergence and Wasserstein minimization. Empirically, we find that PW-DICE improves upon several state-of-the-art methods on multiple testbeds.
Chat is not available.
Successful Page Load