Physics Informed Model Based Reinforcement Learning for Controlling Synchronization of Weakly Coupled Kuramoto System
{kind=link}
Abstract
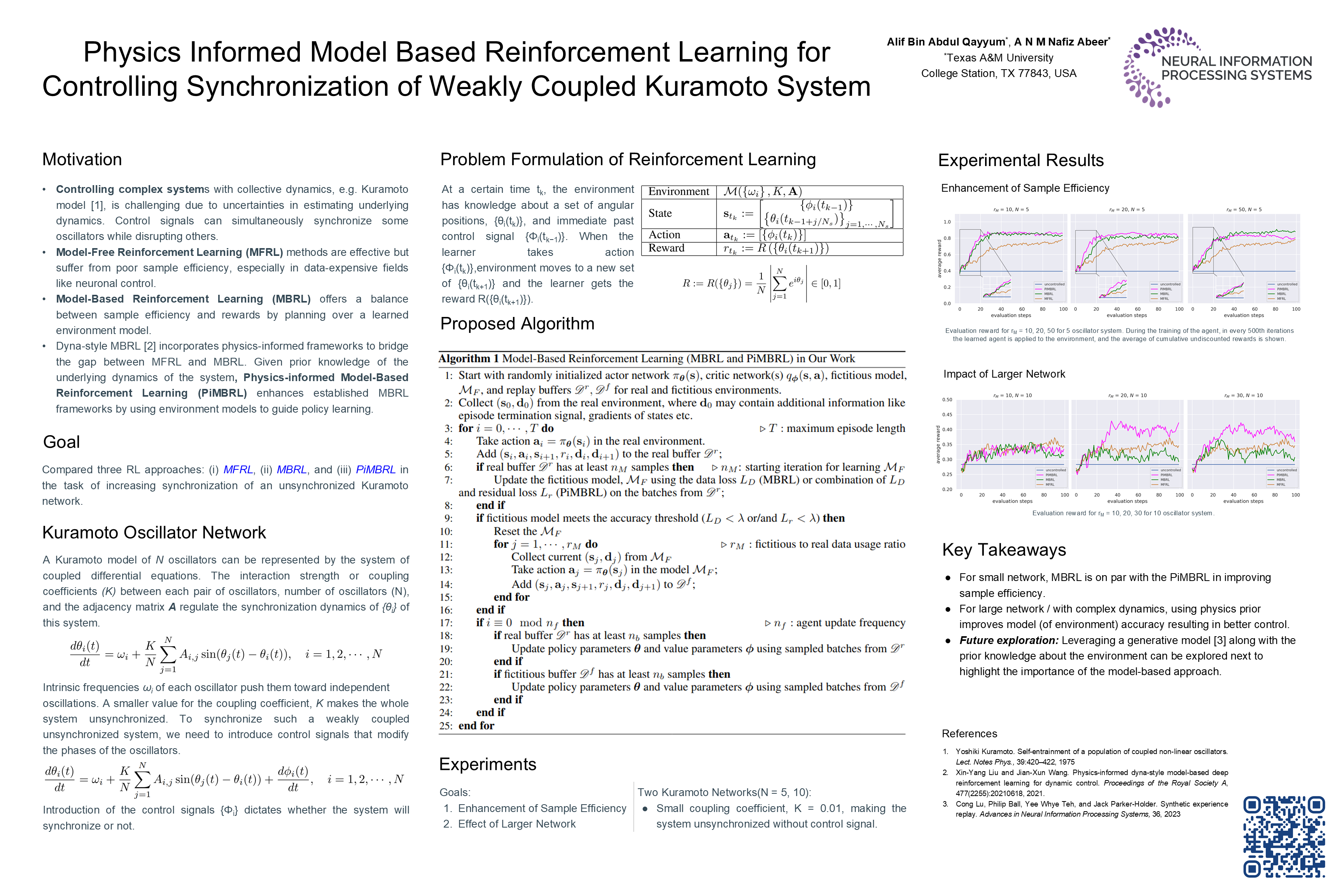
Kuramoto network as a representative of collective dynamics presents a challenging control task of affecting the synchronization of the interacting oscillators. As the dynamics become harder to estimate, making use of a learned model for controlling purposes is difficult. Learning through interactions with the environment enhanced by model-based reinforcement learning (MBRL) algorithms can alleviate the lack of sample efficiency involved with model-free reinforcement learning (MFRL) methods.Given prior knowledge of the underlying dynamics of the system, physics-informed MBRL can achieve even higher efficiency.In this study, we compare the performance of physics-informed MBRL, MBRL, and MFRL in synchronizing the Kuramoto network. We assess the scalability of these three reinforcement learning methods in a naturally chaotic or unsynchronized network.