EGODE: An Event-attended Graph ODE Framework for Modeling Rigid Dynamics
{kind=link}
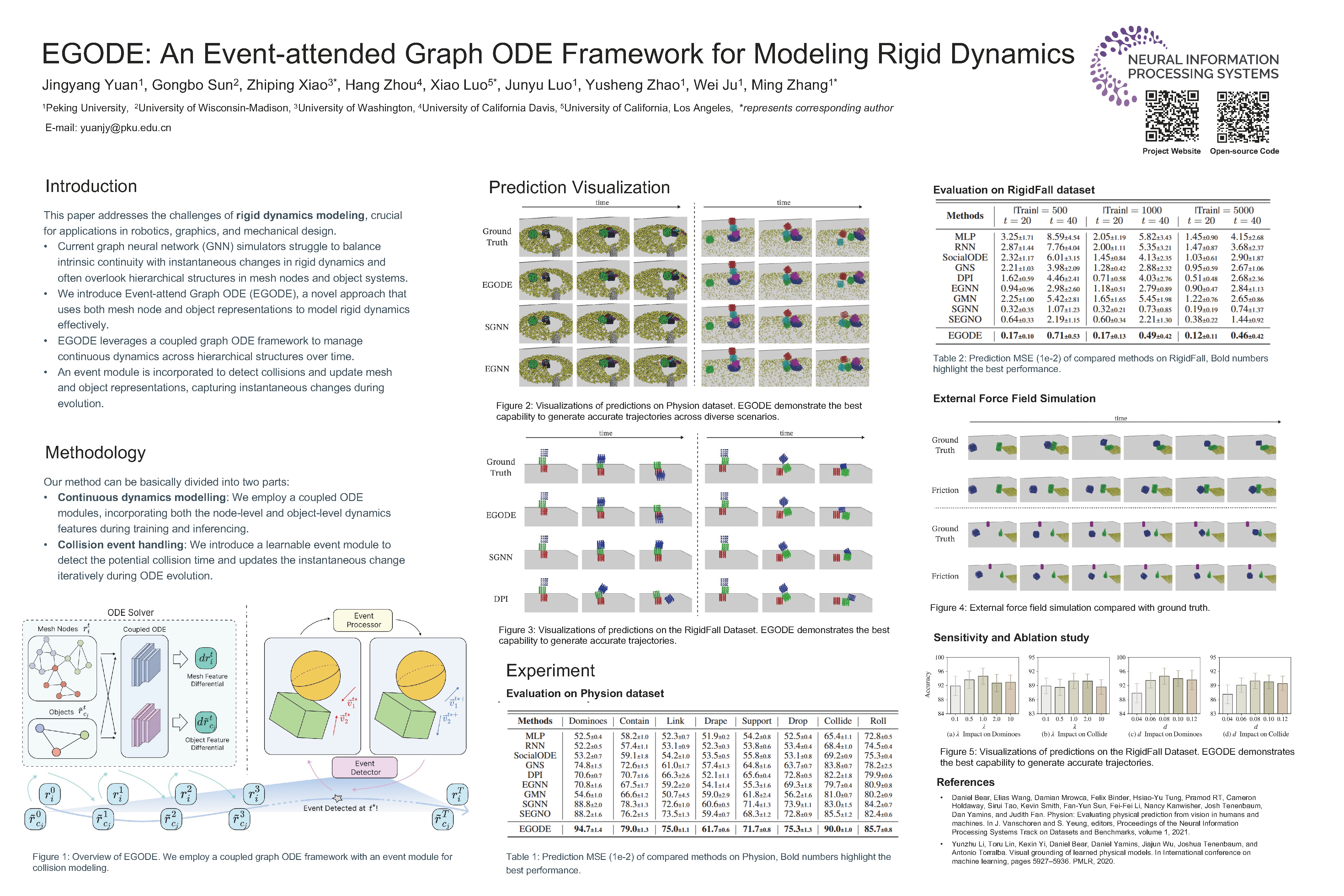
Abstract
This paper studies the problem of rigid dynamics modeling, which has a wide range of applications in robotics, graphics, and mechanical design. The problem is partly solved by graph neural network (GNN) simulators. However, these approaches cannot effectively handle the relationship between intrinsic continuity and instantaneous changes in rigid dynamics. Moreover, they usually neglect hierarchical structures across mesh nodes and objects in systems. In this paper, we propose a novel approach named Event-attend Graph ODE (EGODE) for effective rigid dynamics modeling. In particular, we describe the rigid system using both mesh node representations and object representations. To model continuous dynamics across hierarchical structures, we use a coupled graph ODE framework for the evolution of both types of representations over a long period. In addition, to capture instantaneous changes during the collision, we introduce an event module, which can effectively estimate the occurrence of the collision and update the states of both mesh node and object representations during evolution. Extensive experiments on a range of benchmark datasets validate the superiority of the proposed EGODE compared to various state-of-the-art baselines. The source code can be found at https://github.com/yuanjypku/EGODE.