CooHOI: Learning Cooperative Human-Object Interaction with Manipulated Object Dynamics
{kind=link}
Abstract
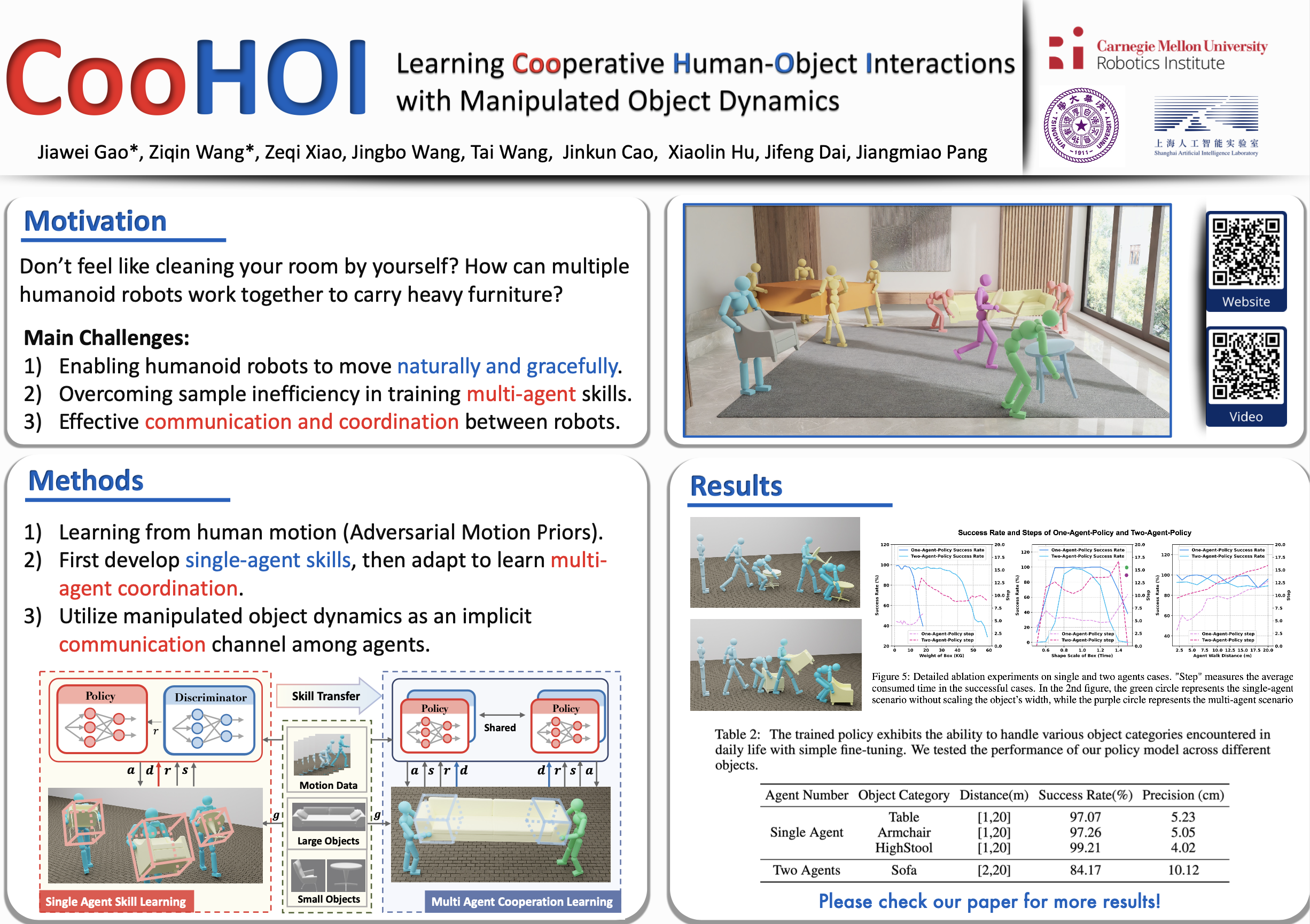
Enabling humanoid robots to clean rooms has long been a pursued dream within humanoid research communities. However, many tasks require multi-humanoid collaboration, such as carrying large and heavy furniture together. Given the scarcity of motion capture data on multi-humanoid collaboration and the efficiency challenges associated with multi-agent learning, these tasks cannot be straightforwardly addressed using training paradigms designed for single-agent scenarios. In this paper, we introduce Cooperative Human-Object Interaction (CooHOI), a framework designed to tackle the challenge of multi-humanoid object transportation problem through a two-phase learning paradigm: individual skill learning and subsequent policy transfer. First, a single humanoid character learns to interact with objects through imitation learning from human motion priors. Then, the humanoid learns to collaborate with others by considering the shared dynamics of the manipulated object using centralized training and decentralized execution (CTDE) multi-agent RL algorithms. When one agent interacts with the object, resulting in specific object dynamics changes, the other agents learn to respond appropriately, thereby achieving implicit communication and coordination between teammates. Unlike previous approaches that relied on tracking-based methods for multi-humanoid HOI, CooHOI is inherently efficient, does not depend on motion capture data of multi-humanoid interactions, and can be seamlessly extended to include more participants and a wide range of object types.