Improved Regret for Bandit Convex Optimization with Delayed Feedback
Yuanyu Wan ⋅ Chang Yao ⋅ Mingli Song ⋅ Lijun Zhang
2024 Poster
{kind=link}
Abstract
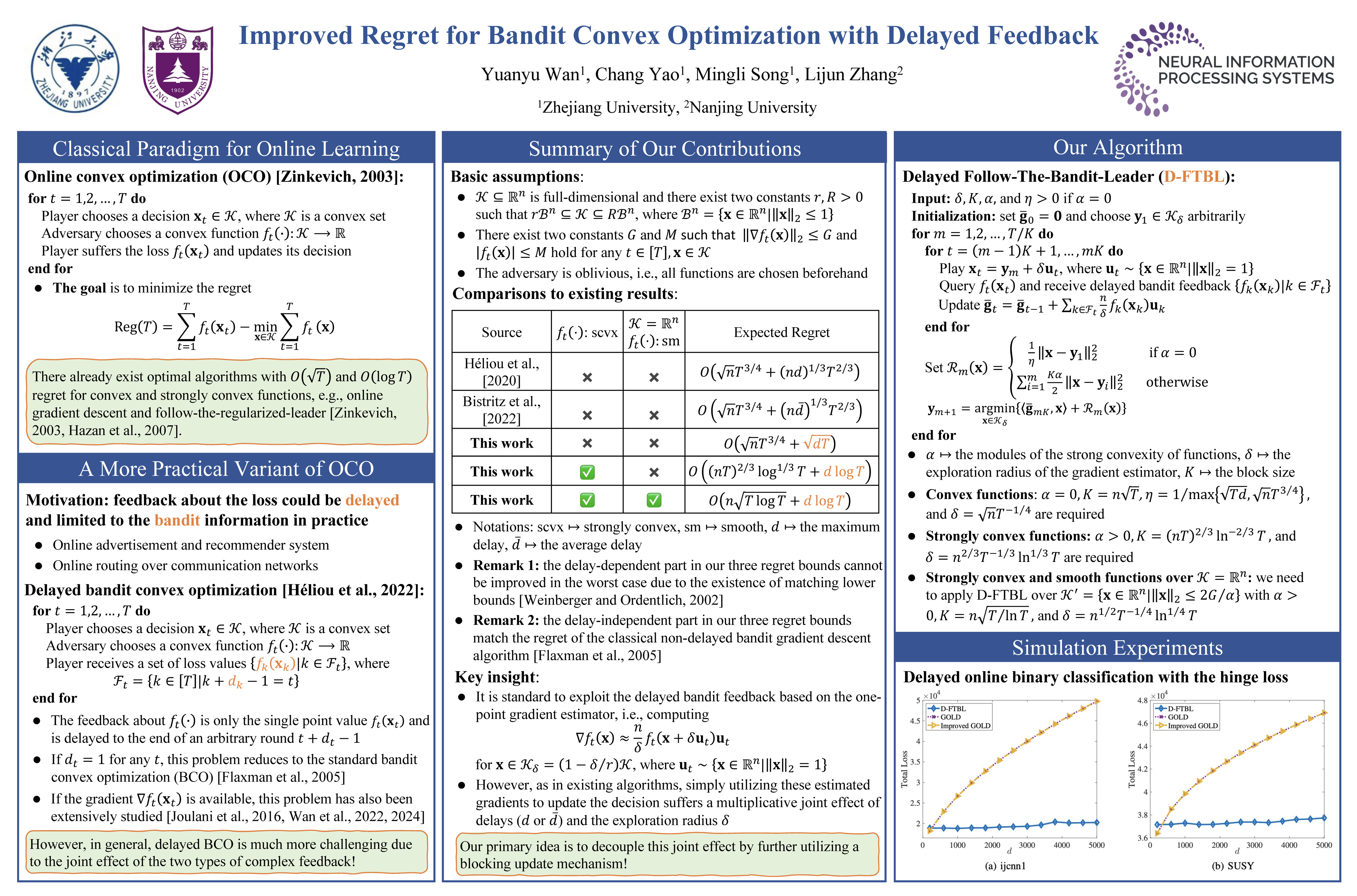
We investigate bandit convex optimization (BCO) with delayed feedback, where only the loss value of the action is revealed under an arbitrary delay. Let $n,T,\bar{d}$ denote the dimensionality, time horizon, and average delay, respectively. Previous studies have achieved an $O(\sqrt{n}T^{3/4}+(n\bar{d})^{1/3}T^{2/3})$ regret bound for this problem, whose delay-independent part matches the regret of the classical non-delayed bandit gradient descent algorithm. However, there is a large gap between its delay-dependent part, i.e., $O((n\bar{d})^{1/3}T^{2/3})$, and an existing $\Omega(\sqrt{\bar{d}T})$ lower bound. In this paper, we illustrate that this gap can be filled in the worst case, where $\bar{d}$ is very close to the maximum delay $d$. Specifically, we first develop a novel algorithm, and prove that it enjoys a regret bound of $O(\sqrt{n}T^{3/4}+\sqrt{dT})$ in general. Compared with the previous result, our regret bound is better for $d=O((n\bar{d})^{2/3}T^{1/3})$, and the delay-dependent part is tight in the worst case. The primary idea is to decouple the joint effect of the delays and the bandit feedback on the regret by carefully incorporating the delayed bandit feedback with a blocking update mechanism. Furthermore, we show that the proposed algorithm can improve the regret bound to $O((nT)^{2/3}\log^{1/3}T+d\log T)$ for strongly convex functions. Finally, if the action sets are unconstrained, we demonstrate that it can be simply extended to achieve an $O(n\sqrt{T\log T}+d\log T)$ regret bound for strongly convex and smooth functions.
Video
Chat is not available.
Successful Page Load